 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

干貨分享 S7-200 SMART 運(yùn)動(dòng)控制(三)
前兩期我們分享了運(yùn)控制的組態(tài)向?qū)В裉煳覀冎饕窒黻P(guān)于步進(jìn)電機(jī)及向?qū)傻母髦噶?子程序如何使用
一、步進(jìn)電機(jī)的概念:
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,當(dāng)步進(jìn)驅(qū)動(dòng)器接收到一個(gè)脈沖信號(hào),它就驅(qū)動(dòng)步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動(dòng)一個(gè)固定的角度,稱為"步距角",它的旋轉(zhuǎn)是以固定的角度一步一步運(yùn)行的。可以通過控制脈沖個(gè)數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時(shí)可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動(dòng)的速度和加速度,從而達(dá)到調(diào)速的目的。
二、基本工作原理
通常電機(jī)的轉(zhuǎn)子為永磁體,當(dāng)電流流過定子繞組時(shí),定子繞組產(chǎn)生一矢量磁場(chǎng)。該磁場(chǎng)會(huì)帶動(dòng)轉(zhuǎn)子旋轉(zhuǎn)一角度,使得轉(zhuǎn)子的一對(duì)磁場(chǎng)方向與定子的磁場(chǎng)方向一致。當(dāng)定子的矢量磁場(chǎng)旋轉(zhuǎn)一個(gè)角度。轉(zhuǎn)子也隨著該磁場(chǎng)轉(zhuǎn)一個(gè)角度。每輸入一個(gè)電脈沖,電動(dòng)機(jī)轉(zhuǎn)動(dòng)一個(gè)角度前進(jìn)一步。它輸出的角位移與輸入的脈沖數(shù)成正比、轉(zhuǎn)速與脈沖頻率成正比。改變繞組通電的順序,電機(jī)就會(huì)反轉(zhuǎn)。所以可用控制脈沖數(shù)量、頻率及電動(dòng)機(jī)各相繞組的通電順序來控制步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)。
三、步進(jìn)電機(jī)的相關(guān)參數(shù)及驅(qū)動(dòng)器介紹
步距角:每輸入一個(gè)脈沖信號(hào)時(shí),電機(jī)轉(zhuǎn)子轉(zhuǎn)過的角度稱為步距角。步距角的大小可以影響電機(jī)的運(yùn)行精度
細(xì)分:指電機(jī)運(yùn)行時(shí)的實(shí)際步距角是基本步距角的幾分之一
脈沖當(dāng)量:當(dāng)控制器輸出一個(gè)定位控制脈沖時(shí)所產(chǎn)生的定位控制移動(dòng)的位移值
電子齒輪比:對(duì)控制器輸出的脈沖數(shù)進(jìn)行放大或縮小,其作用可以調(diào)節(jié)脈沖當(dāng)量,提高加工精度及電機(jī)的轉(zhuǎn)速

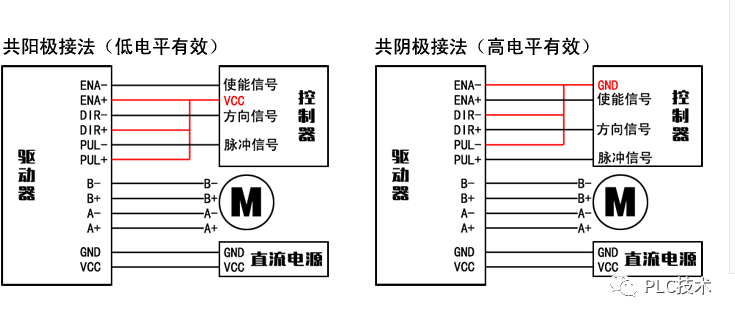
四、步進(jìn)驅(qū)動(dòng)器與PLC的接線

五、指令/子程序的應(yīng)用
1、初始化指令

啟用和初始化運(yùn)動(dòng)軸,自動(dòng)命令運(yùn)動(dòng)軸每次 CPU 更改為 RUN 模式時(shí)加載組態(tài)/包絡(luò)表。
MOD_EN 參數(shù)必須開啟,才能啟用其它運(yùn)動(dòng)控制子例程向運(yùn)動(dòng)軸發(fā)送命令。如果 MOD_EN 參數(shù)關(guān)閉,運(yùn)動(dòng)軸會(huì)中止所有正在進(jìn)行的命令;
Done 參數(shù)會(huì)在運(yùn)動(dòng)軸完成任何一個(gè)子例程時(shí)開啟;
Error 參數(shù)存儲(chǔ)該子程序運(yùn)行時(shí)的錯(cuò)誤代碼;
C_Pos 參數(shù)表示運(yùn)動(dòng)軸的當(dāng)前位置。根據(jù)測(cè)量單位,該值是脈沖數(shù) (DINT) 或工程單位數(shù) (REAL);
C_Speed 參數(shù)提供運(yùn)動(dòng)軸的當(dāng)前速度。
如果針對(duì)脈沖組態(tài)運(yùn)動(dòng)軸的測(cè)量系統(tǒng),C_Speed 是一個(gè) DINT 數(shù)值,其中包含脈沖數(shù)/每秒。如果您針對(duì)工程單位組態(tài)測(cè)量系統(tǒng),C_Speed 是一個(gè) REAL 數(shù)值,其中包含選擇的工程單位數(shù)/每秒 (REAL)。
C_Dir 參數(shù)表示電機(jī)的當(dāng)前方向:信號(hào)狀態(tài) 0 = 正向;信號(hào)狀態(tài) 1 = 反向;
2、手動(dòng)運(yùn)行指令

將運(yùn)動(dòng)軸置為手動(dòng)模式。這允許電機(jī)按不同的速度運(yùn)行,或沿正向或負(fù)向慢進(jìn)。
RUN 參數(shù)會(huì)命令運(yùn)動(dòng)軸加速至的速度(Speed 參數(shù))和方向(Dir 參數(shù))。 我們可以在電機(jī)運(yùn)行時(shí)更改 Speed 參數(shù),但 Dir 參數(shù)必須保持為常數(shù)。禁用 RUN 參數(shù)會(huì)命令運(yùn)動(dòng)軸減速,直至電機(jī)停止;
JOG_P(點(diǎn)動(dòng)正向旋轉(zhuǎn))或 JOG_N(點(diǎn)動(dòng)反向旋轉(zhuǎn))參數(shù)會(huì)命令運(yùn)動(dòng)軸正向或反向點(diǎn)動(dòng)。
如果 JOG_P 或 JOG_N 參數(shù)保持啟用的時(shí)間短于 0.5秒,則運(yùn)動(dòng)軸將通過脈沖指示移動(dòng) JOG_INCREMENT 中的距離。
如果 JOG_P 或 JOG_N 參數(shù)保持啟用的時(shí)間為 0.5秒或更長(zhǎng),則運(yùn)動(dòng)軸將開始加速至的 JOG_SPEED;
Speed 參數(shù)決定啟用 RUN 時(shí)的速度。如果您針對(duì)脈沖組態(tài)運(yùn)動(dòng)軸的測(cè)量系統(tǒng),則速度為 DINT 值(脈沖數(shù)/每秒)。如果您針對(duì)工程單位組態(tài)運(yùn)動(dòng)軸的測(cè)量系統(tǒng),則速度為 REAL 值(單位數(shù)/每秒)。
3、運(yùn)行指令
 命令運(yùn)動(dòng)軸轉(zhuǎn)到所需位置START 參數(shù)開啟會(huì)向運(yùn)動(dòng)軸發(fā)出 GOTO 命令。對(duì)于在 START 參數(shù)開啟且運(yùn)動(dòng)軸當(dāng)前不繁忙時(shí)執(zhí)行的每次掃描,本子例向運(yùn)動(dòng)軸發(fā)送一個(gè) GOTO 命令。為了確保僅發(fā)送了一個(gè) GOTO 命令,務(wù)必使用邊沿檢測(cè)信號(hào)用脈沖方式開啟 START 參數(shù);
命令運(yùn)動(dòng)軸轉(zhuǎn)到所需位置START 參數(shù)開啟會(huì)向運(yùn)動(dòng)軸發(fā)出 GOTO 命令。對(duì)于在 START 參數(shù)開啟且運(yùn)動(dòng)軸當(dāng)前不繁忙時(shí)執(zhí)行的每次掃描,本子例向運(yùn)動(dòng)軸發(fā)送一個(gè) GOTO 命令。為了確保僅發(fā)送了一個(gè) GOTO 命令,務(wù)必使用邊沿檢測(cè)信號(hào)用脈沖方式開啟 START 參數(shù);
Pos 參數(shù)包含一個(gè)數(shù)值,指示要移動(dòng)的位置(移動(dòng))或要移動(dòng)的距離(相對(duì)移動(dòng))。根據(jù)所選的測(cè)量單位,該值是脈沖數(shù) (DINT) 或工程單位數(shù) (REAL);
Speed 參數(shù)確定該移動(dòng)的速度。根據(jù)所選的測(cè)量單位,該值是脈沖數(shù)/每秒 (DINT) 或工程單位數(shù)/每秒 (REAL);
Mode 參數(shù)選擇移動(dòng)的類型:
0:位置(此模式一定要有參考點(diǎn))
1:相對(duì)位置
2:?jiǎn)嗡龠B續(xù)正向旋轉(zhuǎn)(2/3模式只需要速度,和POS位置無(wú)關(guān))
3:?jiǎn)嗡龠B續(xù)反向旋轉(zhuǎn)
Abort 參數(shù)啟動(dòng)會(huì)命令運(yùn)動(dòng)軸停止當(dāng)前包絡(luò)并減速,直至電機(jī)停止。
4、運(yùn)行曲線指令

命令運(yùn)動(dòng)軸按照存儲(chǔ)在組態(tài)/包絡(luò)表的特定包絡(luò)執(zhí)行運(yùn)動(dòng)操作。
START 參數(shù)開啟將向運(yùn)動(dòng)軸發(fā)出 RUN 命令。對(duì)于在 START 參數(shù)開啟且運(yùn)動(dòng)軸當(dāng)前不繁忙時(shí)執(zhí)行的每次掃描,該子例程向運(yùn)動(dòng)軸發(fā)送一個(gè) RUN 命令。為了確保僅發(fā)送了一個(gè)命令,使用邊沿檢測(cè)信號(hào)用脈沖方式開啟 START 參數(shù);
Profile 參數(shù)包含運(yùn)動(dòng)包絡(luò)的編號(hào)或符號(hào)名稱。“Profile”輸入必須介于 0 - 31。否則子例程將返回錯(cuò)誤;
Abort 參數(shù)會(huì)命令運(yùn)動(dòng)軸停止當(dāng)前包絡(luò)并減速,直至電機(jī)停止;
C_Profile 參數(shù)包含運(yùn)動(dòng)軸當(dāng)前執(zhí)行的包絡(luò);
C_Step 參數(shù)包含目前正在執(zhí)行的包絡(luò)步。
5、回原點(diǎn)指令

EN 位開啟會(huì)啟用此子例程。確保 EN 位保持開啟,直至 Done 位指示子例程執(zhí)行已經(jīng)完成;
START 參數(shù)開啟將向運(yùn)動(dòng)軸發(fā)出 RSEEK 命令。對(duì)于在 START 參數(shù)開啟且運(yùn)動(dòng)軸當(dāng)前不繁忙時(shí)執(zhí)行的每次掃描,該子例程向運(yùn)動(dòng)軸發(fā)送一個(gè) RSEEK 命令。
為了確保僅發(fā)送了一個(gè)命令,使用邊沿檢測(cè)信號(hào)用脈沖方式開啟 START 參數(shù)。
6、加載參考點(diǎn)偏移量指令

建立一個(gè)與參考點(diǎn)處于不同位置的新的零位置。
開啟 START 參數(shù)將向運(yùn)動(dòng)軸發(fā)出 LDOFF 命令。對(duì)于在 START 參數(shù)開啟且運(yùn)動(dòng)軸當(dāng)前不繁忙時(shí)執(zhí)行的每次掃描,該子例程向運(yùn)動(dòng)軸發(fā)送一個(gè) LDOFF 命令。為了確保僅發(fā)送了一個(gè)命令,使用邊沿檢測(cè)信號(hào)用脈沖方式開啟 START 參數(shù)。
注意:
在執(zhí)行該子例程之前,我們必須首先確定參考點(diǎn)的位置;并且必須將機(jī)器移至起始位置。
當(dāng)子例程發(fā)送 LDOFF 命令時(shí),運(yùn)動(dòng)軸計(jì)算起始位置(當(dāng)前位置)與參考點(diǎn)位置之間的偏移量。運(yùn)動(dòng)軸然后將算出的偏移量存儲(chǔ)到 RP_OFFSET 參數(shù)并將當(dāng)前位置設(shè)為 0。這將起始位置建立為零位置。
如果電機(jī)失去對(duì)位置的追蹤(例如斷電或手動(dòng)更換電機(jī)的位置),可以使用 AXISx_RSEEK 子例程自動(dòng)重新建立零位置。
7、加載位置指令

將運(yùn)動(dòng)軸中的當(dāng)前位置值更改為新值。我們可以為任何移動(dòng)命令建立一個(gè)新的零位置。
START 參數(shù)開啟將向運(yùn)動(dòng)軸發(fā)出 LDPOS 命令。對(duì)于在 START 參數(shù)開啟且運(yùn)動(dòng)軸當(dāng)前不繁忙時(shí)執(zhí)行的每次掃描,該子例程向運(yùn)動(dòng)軸發(fā)送一個(gè) LDPOS 命令。
為了確保僅發(fā)送了一個(gè)命令,使用邊沿檢測(cè)信號(hào)用脈沖方式開啟 START 參數(shù);
New_Pos 參數(shù)提供新值,用于取代運(yùn)動(dòng)軸報(bào)告和用于移動(dòng)的當(dāng)前位置值。根據(jù)測(cè)量單位,該值是脈沖數(shù) (DINT) 或工程單位數(shù) (REAL)
8、使能/禁止DIS輸出

EN 位打開以啟用子例程時(shí),DIS_ON 參數(shù)控制運(yùn)動(dòng)軸的 DIS 輸出。