 化工儀器網
化工儀器網










詳細介紹
西門子HMI代理商
上海盟疆有限公司在經營活動中精益求精,具備如下業務優勢:
上海盟疆有限公司*銷售西門子PLC,200,300,400,1200,西門子PLC附件,西門子電機,西門
子人機界面,西門子變頻器,西門子數控伺服,西門子總線電纜現貨供應,咨詢系列產品,折扣低,貨期
準時,并且備有大量庫存. 長期有效
西門子數控伺服系統:802C S、802D SL、810D DE、820D SL、840C CE、840D DE、840D SL、840Di SL、S120
數 控 系 統、數 控 伺 服 驅 動 模 塊、控制 模 塊、電 源模 塊、備 品 備 件 等。
本公司產品質量按西門子原廠質量標準,產品質保一年,按西門子原廠包裝標準,西門子原裝 原裝產品,按廠家執行
標準,需方收到貨后七日內可提出異議!!!
我們賣的不是價格。賣的是誠信賣的是品質
1.1 簡介
HART (Highway Addressable Remote Transducer),可尋址遠程傳感器高速通道的開放通信協議, HART協議使用FSK技術,在4~20mA信號過程量上疊加一個頻率信號,成功的實現模擬信號和數字信號雙向通訊,而不互相干擾。
HART 模擬量模塊是指除了可以提供模擬量數值外,還可以提供 HART 通訊功能的模擬量模塊。HART 模擬量模塊可以用于PROFIBUS-DP 的分布式 I/O 從站中。(使用6ES7153-2BA02-0AB0及更高版本或6ES7153-2BB02-0AB0及更高版本的接口模塊作為連接 PROFIBUS-DP 的從站接口)。
1.2 多變量讀取
在實際應用中通常用SFC58,SFC59進行數據記錄的讀寫實現多變量的讀取。但6ES7153-2BA02-0AB0 或更高版本可以使用HART變量直接進行多變量的讀取。
1.3 HART變量
基本要求:IM 153-2(6ES7153-2BA02-0AB0 或更高版本)和 STEP 7(V5.4 SP3 或更高版本)
地址分配:HART 模塊占用 16 個輸入/輸出字節。 如果組態 HART 變量,該模塊將為每個 HART變量分配5 個字節,其中4個字節表示過程值,一個字節表示質量代碼。
HART變量數量:6ES7153-2BA02-0AB0模塊可以多分配 8 個 HART 變量,每個通道的HART 變量不超過 4 個。 您可以在模塊的屬性對話框中為通道分配 HART 變量。
IO資源:如果使用全部 8 個 HART 變量,則 每個HART 模擬量輸入模塊總共占用 56 個輸入/輸出字節(16 個字節 + 8 x 5 個字節 = 56 個字節)。“無”組態不占用其它輸入字節。
組態 HART 變量:可以在 STEP 7 HW Config 中分配 HART 變量。
多變量:PV,SV,TV,QV
● PV(Primary Variable,主變量)
● SV(Secundary Variable,二級變量)
● TV(Teritary Variable,三級變量)
● QV(Quatenary,四級變量)
HART變量結構:
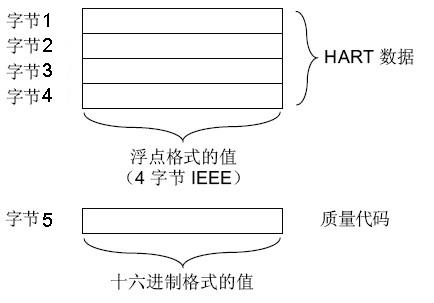
圖1
質量代碼含義:
| Quality-Code (QC) | Meaning | 含義 |
| 0x4C or 0 | Initialization: 0 value of IM and 4C of module | 初始化:IM 的值為 0,模塊為 4C |
| 0x18 | Communication cancelled / no communication | 通訊已取消/無通訊 |
| 0x0C | Fault in HART device | HART 設備故障 |
| 0x47 | HART device is busy | HART 設備繁忙 |
| 0x84 | OK “Configuration changed” | “組態已更改” |
| 0x80 | OK | 正常 |
表1
1.4 直接讀取HART變量的條件:
(1) IM支持這種通訊方式
(2) 模板信息中有hart variables的可以支持
(3) 儀表本身也要能支持多變量
只有在三者滿足的情況下才可以通訊成功。
接口模板是否支持直接讀取HART變量請參見下圖:
6ES7153-2BA02-0AB0:
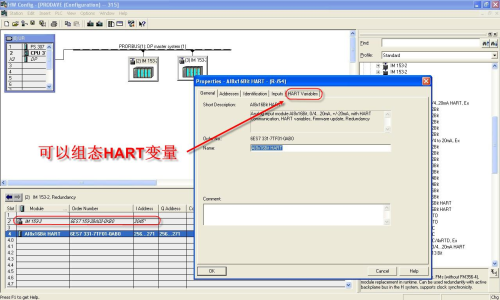
圖2
6ES7153-2BA01-0AB0:

圖3
HART 模擬量模塊是否支持直接讀取HART變量請參見下圖:
其中6ES7331-7TF01-0AB0支持。6ES331-7TF00-0AB0不支持。
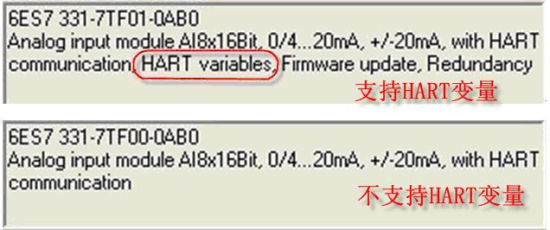
圖4
2. 工程實例
2.1 軟硬件列表
| 模塊(軟件)名稱 | 模塊(軟件)型號 | 定貨號 | 數量 |
| 底板 | RACK | 6ES7390-1AE80-0AA0 | 1 |
| 電源 | PS307 | 6ES7307-1BA00-0AB0 | 1 |
| CPU | 315-2DP | 6ES7315-2AG10-0AB0 | 1 |
| MMC | MMC 4M | 6ES7953-8LM20-0AA0 | 1 |
| 以太網模塊 | 343-1 | 6GK7343-1CX10-0CE0 | 1 |
| ET200M接口模塊 | IM153-2 | 6ES7153-2BA02-0XB0 | 1 |
| HART模板 | 8XAI | 6ES7331-7TF01-0AB0 | 1 |
| HART儀表 | TH-300 | 7NG3212-0NN00 | 1 |
| 通訊電纜 | 6XV1830-0EH10 | 若干米 | |
| DP接頭 | 6ES7 972-0BB50-0XA0 | 2 | |
| Step7 | V5.4 SP4 | 6ES7810-4CC08-0YA5 | 1 |
表2
2.2 HART模板接線方法:
對于6ES7331-7TF01-0AB0模板和HART儀表的接線,請參見下圖:
(1)、紅色線為 +24V,黑色線為 0V。
(2)、黃色信號線為S+,棕色信號線為S-。
在例程中使用的HART儀表為兩線制,此時需要短接10,11。如果為四線制則不需要,具體接線請參考模板手冊。

圖5
2.3 硬件組態步驟:
a. 使用Step7 v5.4 創建300主站項目,在硬件組態窗口依訂貨號添加背板、電源、CPU、343-1模塊。參見下圖:
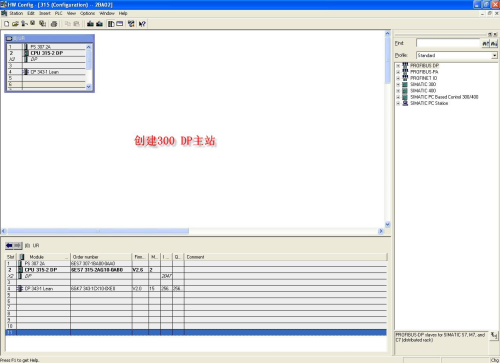
圖6
b. 雙擊DP接口,添加DP網絡并定義網絡參數。參見下圖:
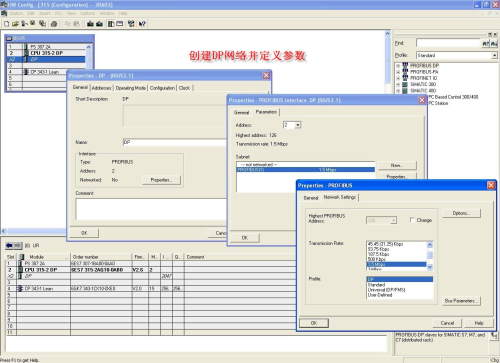
圖7
c. 添加訂貨號為6ES7153-2BA02-0AB0的DP從站,并定義地址為8。參見下圖:
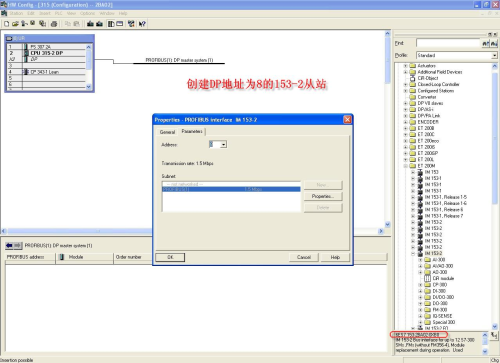
圖8
d. 在8號從站插槽中中添加訂貨號為6ES7331-7TF01-0AB0的HART模擬量模板,并在通道4.0添加一個現場設備。參見下圖:
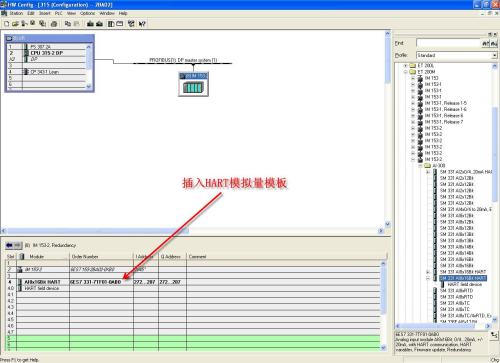
圖9
地址分配列表:例程使用了4.0通道,即PIW272
  | 4.0 | 4.1 | 4.2 | 4.3 | 4.4 | 4.5 | 4.6 | 4.7 |
| PIW | 272 | 274 | 276 | 278 | 280 | 282 | 284 | 286 |
表3
e. 雙擊HART模擬量模板,在Inputs標簽頁定義傳感器類型。參見下圖配置:
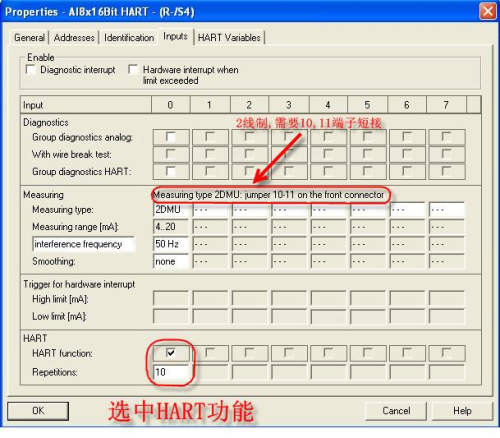
圖10
f. 在HART variables標簽頁定義HART變量,例程使用了前4個HART變量。
HART變量分配列表:
Variable 1為通道0的PV值,地址為PID288
Variable 2為通道0的SV值,地址為PID293
Variable 3為通道0的TV值,地址為PID298
Variable 4為通道0的QV值,地址為PID303
參見下圖配置:
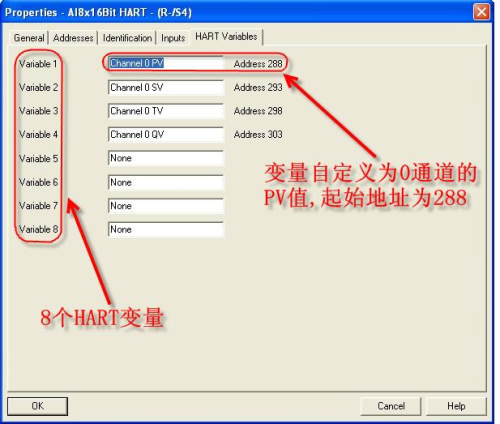
圖11
1 路徑插補功能簡介
1.1 基本概念
插補的概念源于數控機床。在數控機床中,刀具不能嚴格地按照要求加工的曲線(直線)運動,只能用折線軌跡逼近所要加工的曲線。機床數控系統依照一定方法確定刀具運動軌跡的過程,叫做插補。也可以說,已知曲線上的某些數據,按照某種算法計算已知點之間的中間點的方法,或者稱為“數據點的密化”。插補的動作過程:在每個插補周期(極短時間,一般為毫秒級)內,根據指令、進給速度計算出一個微小直線段的數據,刀具沿著微小直線段運動,經過若干個插補周期后,刀具從起點運動到終點,完成輪廓的加工。
路徑運動初來自于機器人和CNC領域,用機器人編程語言或G-Code編程。它是指在多維空間中,通過一組軸的協作動作,各軸之間無主從之分,它們按照設定的動態響應特性,實現路徑對象從起點到終點的的路徑軌跡運動。
路徑插補產生路徑的運行軌跡,計算插補周期內的路徑插補點,并通過機械運動系統轉換獲得對應插補周期內插補點的各路徑軸設定值。
隸屬于機械運動系統的單獨軸在S7 technology中被為路徑軸,路徑軸通過路徑對象執行路徑運動。參考圖1 路徑軸與路徑對象。
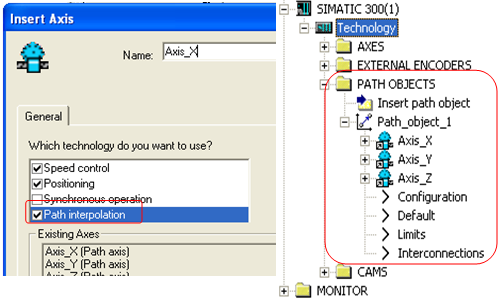
圖1 路徑軸與路徑對象
1.2 S7-Technology 路徑功能特點
S7-Technology 路徑插補功能概述:
> 從S7-Technology V4.2開始
> 允許進行3軸插補操作
> 路徑插補可以通過直線、圓弧、多項式表示實現
> Move Path命令可以組成連續運動
> 支持多種機械運動學模型
> 可以與外部位置值同步,實現傳送帶跟蹤功能
S7-Technology 路徑插補的技術特點:
> 所有的路徑軸都相互同步移動西門子HMI代理商
> 所有的路徑軸都同時到達目標位置
> 路徑軌跡的移動,將會始終是以一個固定的合成速度進行 (如果動態
特性限制沒有被超越)
> 低速度性能的軸,決定了整個軌跡的高動態特性
路徑差補可以執行多3軸之間的2D或者3D的線性、圓弧或者多項式插補,路徑差補工藝對象(TO) ,適用于機械運動學控制范疇,一個共同的系統中,可以存在多個機械運動學控制結構。同步于路徑軸的“同步軸”,仍然可以實現同步控制,例如,旋轉,凸輪開關,測量功能。通過圖形化編輯器,可以簡便地設置機械運動學控制系統的參數;通過動態特性輪廓窗口,可以輕松定義路徑的動態特性;通過軌跡點表格,可以輕松定義路徑差補,計劃目的地路徑。另外還可以定義保護防撞區域和實現傳送帶位置的精確跟蹤。
1.3 機械運動系統的選擇
T-CPU 所實現運動學,等同于人們過去所熟悉機械運動學。可以將它們分為如下兩種不同的類型。參考圖2 在 T-CPU 中集成的機械運動學。
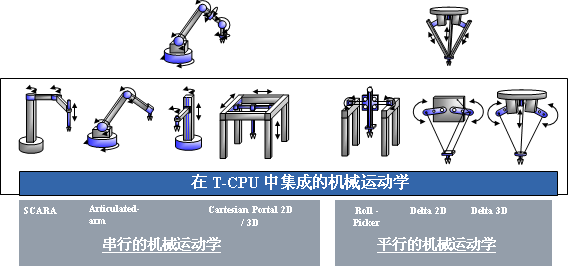
圖2 在 T-CPU 中集成的機械運動學
不同的機械運動系統可以實現TCP (Tool Center Point,工具中心點或機械運動端點)相同的路徑運動功能。盡管在某些情況下,不同的機械運動系統可實現相同的路徑運動,但是,如果機械運動系統選擇不合理,將有可能無法完成的路徑功能。所以,必須根據實際的工藝需求選擇合適的機械運動系統,并在工廠布局中考慮該機構的的合理安裝位置。參考圖3 不同機械系統的轉化。
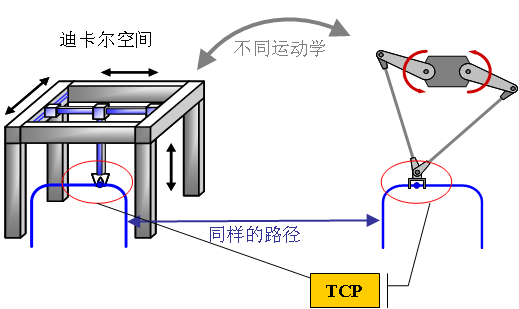
圖3 不同機械系統的轉化
2 路徑插補的實現方法
2.1 運動學模型簡介
常用的運動學模型請參考圖 4 運動學模型。
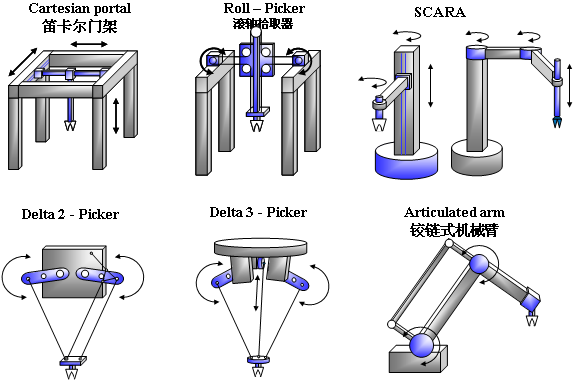
圖 4 運動學模型
下面介紹一些常用的運動學模型。直角坐標機器人 (英文名:Cartesian coordinate robot),大型的直角坐標機器人也稱桁架機器人或龍門式機器人,由多個運動自由度建成空間直角關系的、多用途的操作機器。工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動。因末端操作工具的不同,直角坐標機器人可以非常方便的用作各種自動化設備,完成如焊接、搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標、噴碼、打碼、(軟仿型)噴涂等一系列工作。參考圖5 直角坐標機器人。
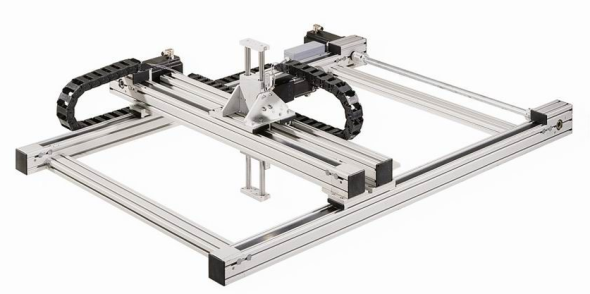
圖5 直角坐標機器人
SCARA 機器人(Selective Compliance Assembly Robot Arm)是一種圓柱坐標型的特殊工業機器人。有3個旋轉關節,其軸線相互平行,在平面內進行定位,另一個關節是移動關節,用于完成機械末端在垂直平面的運動。SCARA機器人在x,y方向上具有良好的順從性、靈活性,而在Z軸方向具有良好的剛度,此特性特別適合于裝配工作。SCARA機器人廣泛應用于塑料工業、汽車工業、電子產品工業、藥品工業和食品工業等領域。它的主要職能是搬取零件和裝配工作。 參考圖6 SCARA 機器人。
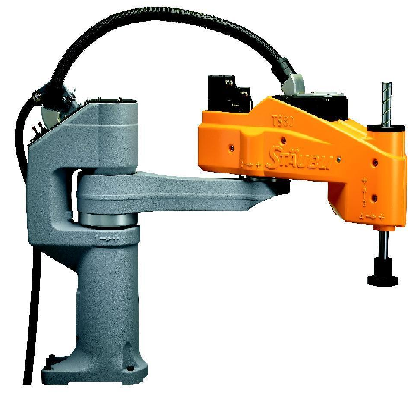
圖6 SCARA 機器人
鉸鏈型機械臂:有很高的自由度,可以多至5~6軸,適合于幾乎任何軌跡或角度的工作,可以自由編程,完成全自動化的工作, 提高生產效率;可以代替很多不適合人力完成、有害身體健康的復雜工作,比如,汽車外殼點焊。參考圖 7 鉸鏈型機械臂。

圖7鉸鏈型機械臂
Delta 3D機器人:外形酷似一只蜘蛛,這種*的幾何結構賦予了它們質量輕,強度大,輕便靈活,節省空間,高速,敏捷;適用于高速分揀。參考圖8 Delta 3D機器人。

圖8 Delta 3D機器人
2.2 路徑插補實現方法
首先需要做軸的定義,選擇“Path interploation”。參考圖 9 路徑軸的定義。
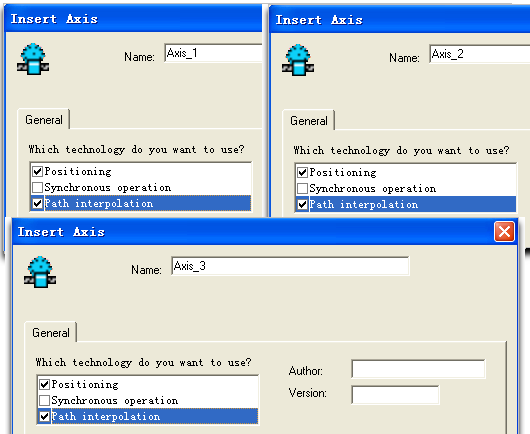
圖9 路徑軸的定義
69 90A/37KW 6SL3224-0BE33-7AA0
70 110A/45KW 6SL3224-0BE34-5AA0
71 145A/55KW 6SL3224-0BE35-5AA0
72 178A/75KW 6SL3224-0BE37-5AA0
73 PM240(帶內置濾波器)380-480V 3AC輕載
74 5.9A/2.2KW 6SL3224-0BE22-2AA0
75 7.7A/3KW 6SL3224-0BE23-0AA0
76 10.2A/4KW 6SL3224-0BE24-0AA0
77 18A/7.5KW 6SL3224-0BE25-5AA0
78 25A/11KW 6SL3224-0BE27-5AA0
79 32A/15KW 6SL3224-0BE31-1AA0
80 38A/18.5KW 6SL3224-0BE31-5AA0
81 45A/22KW 6SL3224-0BE31-8AA0
82 60A/30KW 6SL3224-0BE32-2AA0
83 75A/37KW 6SL3224-0BE33-0AA0
84 90A/45KW 6SL3224-0BE33-7AA0
85 110A/55KW 6SL3224-0BE34-5AA0
86 145A/75KW 6SL3224-0BE35-5AA0
87 178A/90KW 6SL3224-0BE37-5AA0
88 PM250(帶內置濾波器)380-480V 3AC重載
89 18A/5.5KW 6SL3225-0BE25-5AA0
90 18A/5.5KW 6SL3225-0BE25-5AA1
91 25A/7.5KW 6SL3225-0BE27-5AA0
92 25A/7.5KW 6SL3225-0BE27-5AA1
93 32A/11KW 6SL3225-0BE31-1AA0
94 32A/11KW 6SL3225-0BE31-1AA1
95 38A/15KW 6SL3225-0BE31-5AA0
96 45A/18.5KW 6SL3225-0BE31-8AA0
97 60A/22KW 6SL3225-0BE32-2AA0
98 75A/30KW 6SL3225-0BE33-0AA0
99 90A/37KW 6SL3225-0BE33-7AA0
100 110A/45KW 6SL3225-0BE34-5AA0
101 145A/55KW 6SL3225-0BE35-5AA0
102 178A/75KW 6SL3225-0BE37-5AA0
103 PM250(帶內置濾波器)380-480V 3AC輕載
104 18A/7.5KW 6SL3225-0BE25-5AA0
105 18A/7.5KW 6SL3225-0BE25-5AA1
106 25A/11KW 6SL3225-0BE27-5AA0
107 25A/11KW 6SL3225-0BE27-5AA1
108 32A/15KW 6SL3225-0BE31-1AA0
109 32A/15KW 6SL3225-0BE31-1AA1
110 38A/18.5KW 6SL3225-0BE31-5AA0
111 45A/22KW 6SL3225-0BE31-8AA0
112 60A/30KW 6SL3225-0BE32-2AA0
113 75A/37KW 6SL3225-0BE33-0AA0
114 90A/45KW 6SL3225-0BE33-7AA0
115 110A/55KW 6SL3225-0BE34-5AA0
116 145A/75KW 6SL3225-0BE35-5AA0
117 178A/90KW 6SL3225-0BE37-5AA0
118 進線電抗器(僅用于PM240)
119 0.37KW 6SE6400-3CC00-2AD3
120 0.55KW 6SE6400-3CC00-2AD3
121 0.75KW 6SE6400-3CC00-4AD3
122 1.1KW 6SE6400-3CC00-4AD3
123 1.5KW 6SE6400-3CC00-6AD3
124 2.2KW 6SL3203-0CD21-0AA0
125 3KW 6SL3203-0CD21-0AA0
126 4KW 6SL3203-0CD21-4AA0
127 7.5KW 6SL3203-0CD22-2AA0
128 11KW 6SL3203-0CD22-2AA0
129 15KW 6SL3203-0CD23-5AA0
130 18.5KW 6SL3203-0CJ24-5AA0
131 22KW 6SL3203-0CJ24-5AA0
132 30KW 6SL3203-0CD25-3AA0
133 37KW 6SL3203-0CJ28-6AA0
134 45KW 6SL3203-0CJ28-6AA0
135 55KW 6SE6400-3CC11-2FD0
136 75KW 6SE6400-3CC11-2FD0
137 90KW 6SE6400-3CC11-7FD0
138 110KW 6SL3000-0CE32-3AA0
139 132KW 6SL3000-0CE32-8AA0
140 160KW 6SL3000-0CE33-3AA0
141 200KW 6SL3000-0CE35-1AA0
142 250KW 6SL3000-0CE35-1AA0
143 輸出電抗器
144 0.37KW 6SE6400-3TC00-4AD2
145 0.55KW 6SE6400-3TC00-4AD2
146 0.75KW 6SE6400-3TC00-4AD2
147 1.1KW 6SE6400-3TC00-4AD2
148 1.5KW 6SE6400-3TC00-4AD2
149 2.2KW 6SL3202-0AE21-0CA0
150 3KW 6SL3202-0AE21-0CA0
151 4KW 6SL3202-0AE21-0CA0
152 7.5KW 6SL3202-0AJ23-2CA0
153 11KW 6SL3202-0AJ23-2CA0
154 15KW 6SL3202-0AJ23-2CA0
155 18.5KW 6SE6400-3TC05-4DD0
156 22KW 6SE6400-3TC03-8DD0
157 30KW 6SE6400-3TC05-4DD0
158 37KW 6SE6400-3TC08-0ED0
159 45KW 6SE6400-3TC07-5ED0
160 55KW 6SE6400-3TC14-5FD0
161 75KW 6SE6400-3TC15-4FD0
162 90KW 6SE6400-3TC14-5FD0
163 110KW 6SL3000-2BE32-1AA0
164 132KW 6SL3000-2BE32-6AA0
165 160KW 6SL3000-2BE33-2AA0
166 200KW 6SL3000-2BE33-8AA0
167 250KW 6SL3000-2BE35-0AA0
168 制動電阻
169 0.37KW 6SE6400-4BD11-0AA0
170 0.55KW 6SE6400-4BD11-0AA0
171 0.75KW 6SE6400-4BD11-0AA0
172 1.1KW 6SE6400-4BD11-0AA0
173 1.5KW 6SE6400-4BD11-0AA0
174 2.2KW 6SL3201-0BE12-0AA0
175 3KW 6SL3201-0BE12-0AA0
176 4KW 6SL3201-0BE12-0AA0
177 7.5KW 6SE6400-4BD16-5CA0
178 11KW 6SE6400-4BD16-5CA0
179 15KW 6SE6400-4BD16-5CA0
180 18.5KW 6SE6400-4BD21-2DA0
181 22KW 6SE6400-4BD21-2DA0
182 30KW 6SE6400-4BD21-2DA0
183 55KW 6SE6400-4BD24-0FA0
184 75KW 6SE6400-4BD24-0FA0
185 90KW 6SE6400-4BD24-0FA0
186 110KW 6SE6400-4BD26-0FA0
187 132KW 6SE6400-4BD26-0FA0
188 160KW 6SL3000-1BE31-3AA0
189 200KW 6SL3000-1BE32-5AA0
190 250KW 6SL3000-1BE32-5AA0
 化工儀器網
化工儀器網