 化工儀器網
化工儀器網










詳細介紹
西門子6FC5357-0BB34-0AA0
6FC5357-0BB34-0AA0
SINUMERIK 840D/DE NCU 573.4,650MHz,64MB 不帶系統軟件 存儲器:NC 2.5MB,PLC 96KB PROFIBUS-DP 準備
1 V90 概述
SINAMICS V90是西門子推出的一款小型、高效便捷的伺服系統。它作為 SINAMICS 驅動系列家族的新成員,與SIMOTICS S-1FL6 伺服電機*結合,組成優秀的伺服驅動系統,實現位置控制、速度控制和扭矩控制。通過優化的設計,SINAMICS V90 確保了的伺服控制性能,經濟實用、穩定可靠,能用于貼標機、包裝機、壓邊機等等伺服控制系統。
2 進線電壓及功率范圍
SINAMICS V90 200V系列:
伺服控制器進線電壓為1/3 AC 200V~240V,功率范圍從0.1kW ~ 2kW,與低慣量的1FL6電機相匹配。低慣量1FL6電機有8個功率段,4種軸高,功率從0.05kW ~ 2kW,額定轉矩范圍0.16~6.37Nm。
SINAMICS V90 400V系列:
伺服控制器進線電壓為380V~480V,功率范圍從0.4~7Kw,與高慣量的1FL6電機相匹配。高慣量1FL6電機有11 個功率段,3種軸高,功率從0.4kW ~ 7kW,額定轉矩范圍從1.27~33.4Nm。
SINAMICS V90伺服控制器與1FL6電機對應關系如表1所示。
注意:必須嚴格按照圖2-1中的對應關系選擇驅動器。如果驅動器和電機不匹配將無法使用。
表1 V90與1FL6對應關系
Task
本例為如何調試兩臺變頻器主從控制。
一個簡單的示例如傳送帶上有兩臺變頻器:一臺為主傳動,一臺為從傳動控制。
傳送帶的速度通過主傳動設定 (電機 M1) (如:通過 AIN 1)。主傳動選用帶編碼器的矢量控制,從傳動為帶編碼器的閉環轉矩控制。 從傳動轉矩設定值來自于主傳動轉矩,需要將主傳動模擬量輸出連接到從傳動的模擬量輸入。
基本*條件
MICROMASTER 440變頻器與配置 CU240S(版本3.2以上)的 SINAMICS G120均可。
解決方案
按說明書調試兩臺變頻器如下:
1. 兩臺變頻分別做快速調試
2. 兩臺變頻分別做電機識別
3. 兩臺變頻器分別做帶編碼器的調試
4. 主傳動模擬量輸出端2連接到從傳動模擬量輸入端2
5. 設定從傳動I/O端子板的模擬量輸入端子2的撥碼開關為ON(0-20mA輸入)
調試之前首先要校對電機速度,方法是采用V/F(見P1300)控制方式,兩臺變頻器運行速度要相同,比較參數r0061和r0021值的大小,電機的轉向和大小必須*(微小的偏差是可以接受的)。如果完成了以上要求, 則改變P1300的值來激活帶編碼器閉環矢量控制/閉環轉矩控制(參考 MM440參數手冊, 3.29節控制模式,參數 P1300;3.5節速度編碼器,參數P0400;MM440操作說明,3.23.2節)。如果電機旋轉方向不正確,應該檢查變頻器的輸出相序和編碼器通道,必要時進行改線。
注意
參數P1820設置為1就可以改變電機轉向而不需要重新接電機動力電纜,同時參數P0410設置為1可以改變編碼器轉向檢測(只對SINAMICS G120;參考CU240S參數手冊…參數 P0410)。
主傳動的參數設置西門子6FC5357-0BB34-0AA0
1. P0771.1 = r0079 模擬量輸出2為轉矩設定值
為了能將從主機來的負轉矩設定值給定到從機(電機的正轉與反轉),主機模擬量輸出需標定如下:
2. P0777.1 = 0 % x1 值 = 0 %
3. P0778.1 = 10 y1 值 = 10 mA
4. P0779.1 = 100 % x2 值 = 100 %
5. P0780.1 = 20 y2 值 = 20 mA
6. P1300 = 21 帶編碼器矢量控制
從傳動參數需設置如下
7. P0756.1 = 2 模擬輸入2 0-20mA
模擬輸入的標定:
8. P0757.1 = 10 x1 值 = 10 mA
9. P0758.1 = 0 % y1 值 = 0 %
10. P0759.1 = 20 x2 值 = 20 mA
11. P0760.1 = 100 % y2 值 = 100 %
12. P1082 = 55 大頻率 (比主傳動值高)
13. P1300 = 23 帶編碼器轉矩控制
14. P1503 = r0755.1 模擬輸入2作為轉矩設定
15. P2000 = 55 基準頻率 (比主傳動值高)
如果從機故障停機,必須盡可能快得關斷主傳動。需要將從傳動的故障位 r0052.3輸出作為主機的OFF2命令或脈沖使能,從機數字輸出 (e.g. DOUT1) 應連接到主機的數字輸入 (如: DIN4).
將從機的端子19與20連接到主機端子8與9上。
相應的參數需要設置:
從傳動
P0731.0 = 52.3
主傳動
P0704 = 99
P0844.0 = 722.3 OFF2 命令
Or/and
P0852.0 = 722.3 脈沖使能
系統的原理框圖
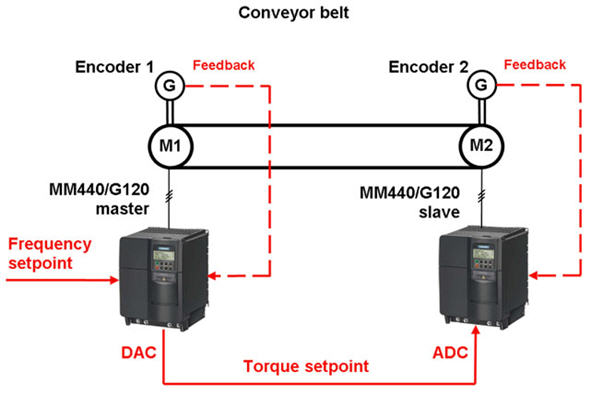
Fig. 01
HMI
6AV6 640-0BA11-0AX0
6AV6 640-0CA11-0AX1
6AV6 640-0DA11-0AX0
6AV6 641-0AA11-0AX0
6AV6641-0BA11-0AX0
6AV6641-0CA01-0AX0
6AV6642-0AA11-0AX1
6AV6642-0BC01-1AX1
6AV6642-0BA01-1AX1
6AV6642-0DC01-1AX1
6AV6642-0DA01-1AX1
6AV6643-0BA01-1AX0
6AV6643-0AA01-1AX0
6AV6643-0CB01-1AX1
6AV6643-0DB01-1AX1
6AV6643-0CD01-1AX1
6AV6643-0DD01-1AX1
6AV6671-1CB00-0AX2
6AV6671-1CB00-0AX1
6AV6644-0AA01-2AX0
6AV6644-0AB01-2AX0
6AV6644-0AC01-2AX0
6AV6644-0BA01-2AX0
舊屏
6AV6 545-0BA15-2AX0
6AV6 545-0BB15-2AX0
6AV6 545-0BC15-2AX0
6AV6 542-0BB15-2AX0
6AV6 545-0CA10-0AX0
6AV6 545-0CC10-0AX0
6AV6 542-0CA10-0AX0
6AV6 542-0CC10-0AX0
6AV6 542-0AG10-0AX0
6AV6 545-0AH10-0AX0
6AV6 545-0AG10-0AX0
6AV6 542-0DA10-0AX0
6AV6 545-0DA10-0AX0
6AV6 545-0DB10-0AX0
6AV6 574-2AC00-2AA1
6AV6648-0BC11-3AX0
6AV6 648-0BE11-3AX0
6AV6645-0BB01-0AX0
6AV6381-2BP07-0AV0
6AV6647-0AB11-3AX0
6AV2124-0GC01-0AX0
6AV2124-0MC01-0AX0
6AV6647-0AE11-3AX0
6AV6647-0AD11-3AXO
6AV6647-0AG11-3AX0
6AV2124-1QC02-0AX0
6AV6647-0AB11-3AX0
6AV6647-0AC11-3AX0
6AV6640-0DA11-0AX0
6AV6545-0DB10-0AX0
6AV6640-0AA00-0AX1
6AV6642-0EA01-3AX0
6AV62124-4QB00-0AX0
6AV2124-0JC01-0AX0
 化工儀器網
化工儀器網