 化工儀器網
化工儀器網










詳細介紹
西門子6RA7093-4GS22-0
6RA7093-4GS22-0
SIMOREG DC Master 整流器 帶微處理器 針對單象限驅動 電路 B6C 輸入:575V 三相交流,1326A 可操控:勵磁整流器 D690/1600 MRE-GEEF4S22 輸出:690V DC,1600A 輸出端 US 等級:690V DC, 1190A 現場輸入端 460V 輸出端 375V,40A
6RA70在實際應用中往往需要兩組命令對裝置實現兩地操作控制,類似這類問題可以歸納為數據組進行切換,如果已經激活了S00 軟件,也可以使用自由功能塊轉換開關進行切換。
1數據組實現兩地操作的參數設置
1.1 命令數據組的切換
6RA70裝置中命令數據組只有兩種組合形式,命令數據組參數一個顯著的標記,在參數表描述中在參數的下方有BDS字樣或在功能圖中,參數的后面緊跟著.B,如P654.B,或者在drivemonitor參數表中有BiCo字樣,如下圖1

圖1
在這里需要說明一下,命令數據組參數有些參數的兩個子參數的默認值并不相同,如果此時需要兩個命令數據組切換后控制邏輯保持相同,一般需要進行命令數據組復制。
具體操作如下:

圖2
如果把命令參數組1的值拷貝到參數組2,設置P057=112即可。復制完成后P057=0012。
1.2 功能數據組的切換
由于在6RA70裝置中,設定點的源屬于功能數據組的范疇,所以在實現就地/遠程切換時,命令切換的同時,設定點的源也要同時進行切換。

圖3
如果把功能參數組1的值拷貝到參數組2,設置P055=112即可。復制完成后P055=0012。
1.3數據組參數設置步驟
下面假設兩個條件進行參數設置:
A.通過端子36進行合分閘控制,端子39作為就地/遠程切換,模擬量輸入通道1作為速度給定
B. 通過profibus-DP通訊進行控制
說明:

圖4
端子36對應B0010
端子39對應B0016

圖5
模擬輸入通道1對應的連接器為K0011
Profibus-DP通訊*個通道為控制字(K3001),第二個通道為速度給定(K3002)
控制字K3001可以分解為位的形式:B3100…….B3115.
6RA70的37和38端子為外部的合閘和使能端子,在任何情況下,端子37和38都參與控制,也就是說無論內部參數怎樣設置,如果使用內部參數啟動和合閘時,外部的端子37和38 都必須為高電平。
參數設置如下:
P654.1=10 啟動指令
P433.1=11 速度設定通道
P690=16 命令數據組切換指令 端子36作為切換
P676.01=16 功能數據組切換指令 端子36作為切換
P057=112 命令數據組復制
P055=112 功能數據組復制
P654.2=3100
P433.2=3002
2自由功能塊實現兩地操作的參數設置
如果要想通過自由功能塊實現遠程/就地操作,首先要購買S00軟件的授權,沒有授權不能長時間使用S00 軟件,臨時只有500小時。S00軟件激活的標志就是n978=2000。通過自由功能塊實現遠程/就地操作,主要是應用模擬信號轉換開關和數字轉換開關。
同樣采用1.3節的兩種假設。
2.1 模擬信號轉換

圖6
參數設置:
U241=16
U240.01=11
U240.02=3002
P433.01=9210
或者可以使用連接器選擇開關,見功能圖G124

圖7
參數設置:
P456.01=16
P455.01=11
P455.02=3002
P433.01=230
2.2數字信號切換
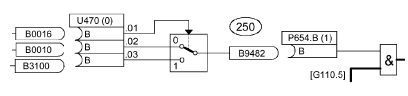
圖8
參數設置:
U470.01=16
U470.02=10
U470.03=3100
P654.01=9482
一. peer-to-peer 通訊
首先,介紹以下peer-to-peer 通訊:根據不同的應用形式分為三類:以X172 接口為例:
1. 串行連接

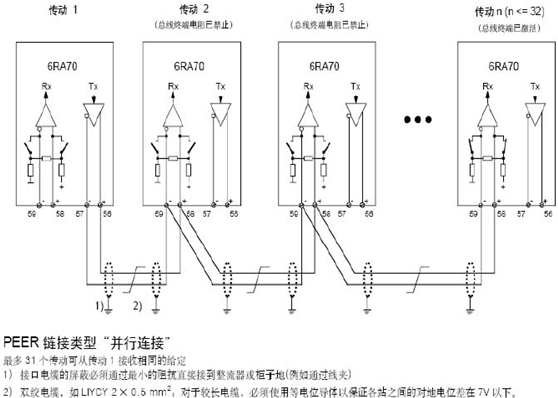
2.并行連接
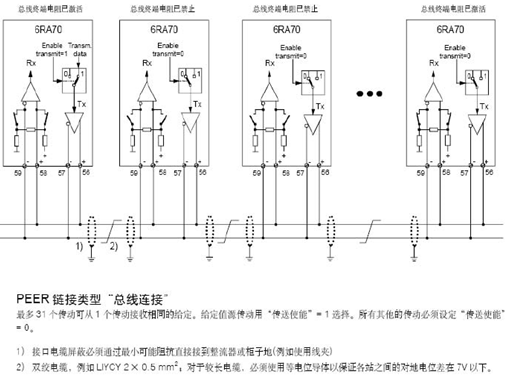
3.總線連接
4.參數設置:

二. 實際生產應用中,主從控制方式應用分兩種形式:
1. 電機首尾通過法蘭直接硬相連,主動裝置工作在速度環工作狀態,而從動裝置工作在電流環(轉矩環)狀態,在這種方式中,一般情況下,定義遠離減速機的電機作為主動電機,編碼器接在主動裝置所帶的電機上。
從動裝置通過peer-to-peer 網絡接收來自主動裝置發送來的電流(轉矩)給定,速度實際值和控制字1。
連接簡圖1:
 西門子6RA7093-4GS22-0
西門子6RA7093-4GS22-0
上圖是電機硬軸直接連接的主從控制的控制方式連接簡圖,主電路連接請參考6RA70 手冊。這種方式中,主動裝置工作在速度環狀態,產生轉矩設定值,把這個值通過peer-to -peer 網絡傳遞給從動裝置,同時,把控制字1 也傳到從動裝置,使得主,從動裝置起停操作同時進行。這時候,從動裝置上的端子 34 ,37, 38 要短接在一起。實際速度傳到從動裝置,主要是為了標定勵磁曲線。此時,從動裝置的斜坡函數發生器和速度調節器不處于激活狀態。通過這種連接,從動裝置與主動裝置能一起向前和向后運行。
根據生產工藝要求, 在一些場合, 工作負載量很小,只需一個電機工作就可以,此時,需把從動裝置上的端子34 ,37和38 要用一個開關使其使能取消,同時P082不能設置成3 , 或把從動裝置主電源斷掉。
參數設置:
| 主動裝置 | 從動裝置1…n |
| P081=1 裝置弱磁運行 | P081=1 裝置弱磁運行 |
| P083=2 編碼器反饋 | P083=4 自由連接的速度反饋 |
| P169=0 轉矩控制 | P169=0 轉矩控制 |
| P170=1 轉矩控制 | P170=1 轉矩控制 |
P503=xx 電機-裝置匹配系數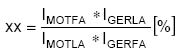  P171=xx 電機-裝置匹配系數 | |
| P500=6002 來自主動裝置的轉矩設定點 | |
| P609=6001來自主動裝置的速度實際值 | |
| P648=6003 來自主動裝置的控制字 | |
| P687=1 設置從動開關 | |
| P790=5 裝置對裝置通訊 | P790=5 裝置對裝置通訊 |
| P791=3 發送字數量 | P791=3 發送字數量 |
| P793=8 波特率 | P793=8 波特率 |
| P794.01=167 實際速度 | |
| P794.02=148 轉矩設定點 | |
| P794.03=30 控制字1 | |
| P795=1 終端電阻 | |
| P797=2s 報文監控時間 | P797=2s 報文監控時間 |
以上參數只是關于主從控制方面的設置,關于啟動參見6RA70 手冊的第7.5節的啟動步驟.。
關于優化運行步驟:
(1) 主動裝置的優化運行
a.打開電機和減速機之間的連接,
b.在從動裝置上設定P171=0 P172 =0
c.執行P051=25 優化
d.執行P051=26優化,必要時,進行手動優化,達到使輸出轉速平穩,為弱磁優化做準備
e.執行P051=27優化
f. 在從動裝置上恢復P171 ,P172的值
(2).從動裝置的優化運行
a.把主動裝置的P171, P172設置成0
b.執行P051=25 優化
c.執行P051=27 優化
d.把主動裝置的P171 P172 恢復成原來的值
(3)當把電機與減速機連接以后,要設置P051=26 優化運行,調整轉速達到平穩。
2. 第二種情況是應用于類似印刷行業,與*種情況基本相同,在這種情況下,電機軸的連接可以自由分開。根據電機連接軸的連接方式分為下列兩種情況:
見下列簡圖2:

圖2
控制模式1
1. 電機軸連接在一起即,Ku1閉合
圖中G1為主動裝置,運行在速度環狀態,,G2為從動裝置,運行于電流環控制,給定值通過peer-to-peer 接收主動裝置的轉矩給定或電流給定。在這種情況下,電機軸連接Ku1必須牢固閉合,否則,可能由于失去速度環的控制而產生超速現象。
2. 當電機軸分開運行時,即Ku1脫開
此時,主動裝置G1與從動裝置G2獨立工作于速度環控制模式, G1 的速度給定通過模擬量(或網絡),G2的速度給定通過peer-to-peer,把G1的斜坡發生器的輸出給到G2的速度環的給定,同時,把G2的模擬量作為G2的速度補償量,從而達到G1和G2的同步。
參數設置:
| 主動裝置 | 從動裝置1…n |
| P081=1 裝置弱磁運行 | P081=1 裝置弱磁運行 |
| P083=2 編碼器反饋 | P083=2 編碼器反饋 |
| P169=0 轉矩控制 | P169=0 轉矩控制 |
| P170=1 轉矩控制 | P170=1 轉矩控制 |
P503=xx 電機-裝置匹配系數  主動電機電流 P171=xx 電機-裝置匹配系數 | |
P500=6002 來自主動裝置的轉矩設定點 | |
| P634.01=6001來自主動裝置的速度給定值 |
| P634.02=11 速度補償 | |
| P687=10 主從動切換開關 | |
| P648=6003 來自主動裝置的控制字1 | |
| P790=5 裝置對裝置通訊 | P790=5 裝置對裝置通訊 |
| P791=3 發送字數量 | P791=3 發送字數量 |
| P793=8 波特率 | P793=8 波特率 |
| P794.01=170 速度設定值 | |
| P794.02=148 轉矩設定點 | |
| P794.03=30 控制字1 | |
| P795=1 終端電阻 | |
| P797=2s 報文監控時間 | P797=2s 報文監控時間 |
電機的優化運行操作:
把電機連接軸分開,分別對兩個電機進行優化操作,詳細操作,參考6RA70 操作手冊第7.5章節。
控制模式2
當兩電機軸Ku1 牢固連接時,主動裝置G1和從動裝置G2都工作于速度環控制,G2的速度給定同樣來自G1的斜坡函數發生器的輸出,但同時,要通過G2的速度補償給定使G2的速度超前于G1裝置5%,使得G2的速度環逐漸趨于飽和。把G1的速度調節器的輸出通過peer-to-peer 傳送到G2 作為轉矩限幅,使得G2和G1的輸出轉矩相等。如果突然電機連接軸脫開,G2的速度只能增加5% 。此時由于G2的速度環退出飽和狀態而按照大于G1的給定的5%運行,不致于超速飛車。
參數設置情況:
| 主動裝置 | 從動裝置1…n |
| P081=1 裝置弱磁運行 | P081=1 裝置弱磁運行 |
| P083=2 編碼器反饋 | P083=2 編碼器反饋 |
| P169=0 轉矩控制 | P169=0 轉矩控制 |
| P170=1 轉矩控制 | P170=1 轉矩控制 |
P171=xx 電機-裝置匹配系數  | |
P430.01=10 來自主動裝置的轉矩設定點開關 | |
| P430.02=11 速度補償 | |
| P431.01=6002 來自主動裝置的轉矩設定點 | |
| P431.02=2 轉矩限幅 | |
| P605.01=204 轉矩限幅 | |
| P606.01=4 打開轉矩限幅 | |
| P621=15 速度超前設定 | |
| P634.01=6001來自主動裝置的速度設定點 | |
| P634.02=11速度補償 | |
| P648=6003 來自主動裝置的控制字1 | |
| P706=11 速度補償開關 | |
| P712=5% | |
| P716=10 速度超前補償開關 | |
| P790=5 裝置對裝置通訊 | P790=5 裝置對裝置通訊 |
| P791=3 發送字數量 | P791=3 發送字數量 |
| P793=8 波特率 | P793=8 波特率 |
| P794.01=170 速度設定值 | |
| P794.02=148 轉矩設定點 | |
| P794.03=30 控制字1 | |
| P795=1 終端電阻 | |
| P797=2s 報文監控時間 | P797=2s 報文監控時間 |
電機的優化運行操作:把電機連接軸分開,分別對兩個電機進行優化操作,詳細操作,參考6RA70 操作手冊第7.5章節
功能模板
6ES7 350-1AH03-0AE0
6ES7 350-2AH00-0AE0
6ES7 351-1AH01-0AE0
6ES7 352-1AH02-0AE0
6ES7 355-0VH10-0AE0
6ES7 355-1VH10-0AE0
6ES7 355-2CH00-0AE0
6ES7 355-2SH00-0AE0
6ES7 338-4BC01-0AB0
6ES7 352-5AH00-0AE0
6ES7 352-5AH00-7XG0
通訊模板
6ES7 340-1AH02-0AE0
6ES7 340-1BH02-0AE0
6ES7 340-1CH02-0AE0
6ES7 341-1AH01-0AE0
6ES7 341-1BH01-0AE0
6ES7 341-1CH01-0AE0
6ES7 870-1AA01-0YA0
6ES7 870-1AB01-0YA0
6ES7 902-1AB00-0AA0
6ES7 902-1AC00-0AA0
6ES7 902-1AD00-0AA0
6ES7 902-2AB00-0AA0
6ES7 902-2AC00-0AA0
6ES7 902-2AG00-0AA0
6ES7 902-3AB00-0AA0
6ES7 902-3AC00-0AA0
6ES7 902-3AG00-0AA0
6GK7 342-5DA02-0XE0
6GK7 342-5DF00-0XE0
6GK7 343-5FA01-0XE0
6GK7 343-1EX30-0XE0
6GK7 343-1EX21-0XE0
6GK7 343-1CX00-0XE0
6GK7 343-1CX10-0XE0
6GK7 343-1GX20-0XE0
6GK7 343-1GX21-0XE0
6GK7 343-1HX00-0XE0
6GK7 343-2AH00-0XA0
6ES7971-1AA00-0AA0
6ES7971-5BB00-0AA0
6ES7314-6EH04-0AB0
6GF30200AC400AC0
6GF30200AC400AC1
6GF30200AC400AC3
6GF30200AC400AC4
6GF30200AC400AC5
6GF30200AC400AP1
6GF30200AC400AP2
6GF33200AC02
6GF33200AC03
6GF33200AC07
6GF33200HT01
6GF33250AC03
6GF33250AC07
6GF33250HT01
6GF33400HT01
6GF34000AP01
6GF34000AP02
6GF34000AP03
6GF34000BH15
6GF34000LT017BA1
6GF34000LT018DA1
6GF34000TP03
6GF34001BH20
6GF34200AA20
6GF34200AA40
6GF34200AX20
6GF34200AX40
6GF34200AC000LK0
6GF34200AC001AA0
6GF34200AC001LK0
6GF34200AC001LT0
6GF34200AC001PS0
6GF34200AC002AA0
6GF34200AC002CB0
6GF34200AC002LT0
6GF34200AC003LT0
6GF34000SL01
6GF34001SL01
6GF34000SL02
6GF34000SL03
6GF34401CD10
 化工儀器網
化工儀器網