 化工儀器網
化工儀器網










詳細介紹
江西西門子代理商
凡在上海盟疆有限公司采購西門子產品,均可質保一年,假一罰十
花30秒詢價,你會知道什么叫優勢;花60秒咨詢,你會知道什么叫服務;
合作一次,你會知道什么叫質量!以質量求生存,以信譽求發展。
我司將提供的質量,服務作為自已重要的責任。
西門子股份公司是優秀的技術企業,創立于1847年,業務遍及200多個國家,專注于電氣化、自動化和數字化領域。作為世界大的高效能源和資源節約型技術供應商之一,西門子在海上風機建設、燃氣輪機和蒸汽輪機發電、輸電解決方案、基礎設施解決方案、工業自動化、驅動和軟件解決方案,以及醫療成像設備和實驗室診斷等領域占據優秀地位。
西門子早在中國開展經營活動可以追溯到1872年,當時西門子向中國出口了臺指針式電報機,并在19世紀末交付了中國臺蒸汽發電機以及輛有軌電車。1985年,西門子與中國政府簽署了合作備忘錄,成為家與中國進行深入合作的外國企業。140多年來,西門子以創新的技術、的解決方案和產品堅持不懈地為中國的發展提供全面支持,并以出眾的品質和令人信賴的可靠性、優秀的技術成就、不懈的創新追求,在業界獨樹一幟。
西門子見證了中國改革開放帶來的巨大變化,同時也順應時代潮流,不斷積極進行自身的改革與發展。2015財年(2014年10月1日至2015年9月30日),西門子在中國的總營收達到69.4億歐元,實現穩健增長。西門子在中國擁有約32000名員工,是中國大的外商投資企業之一。
西門子已經發展成為中國社會和經濟不可分割的一部分,以其環保業務組合與創新解決方案全面投入到與中國的合作中,共同致力于實現可持續發展。公司將更好地把握市場脈搏,了解本地信息,更加快速高效地滿足客戶的需求。
矢志創新融入中國發展
中國擁有多樣化的市場需求和愿意嘗試新事物的客戶群,是發展高級創新的理想之地。西門子致力于為中國市場設計和開發滿足當地客戶真實需求的產品及解決方案,建立與客戶強有力的伙伴關系,融入中國的創新體系,并為技術創新做出貢獻。西門子提出多項針對中國環境的創新理念與模式,如SMART創新(Simple 簡單易用,Maintenance friendly 易于維護,Affordable 價格適當,Reliable 可靠耐用,Timely to market 及時上市),需求驅動、橫縱融合的顛覆性創新等,在創新界及工業界產生了重要影響。
截至2015財年,西門子在中國建立了20個研發中心,擁有約4500名研發人員和工程師,以及超過1萬項有效及申請。優秀的研究人員工作在西門子設在北京、上海、南京、無錫、武漢和天津等地的世界的創新實驗室里,為中國的“自主創新”作貢獻。
2016年,西門子將在中國成立新的研發創新中心。中心將實現跨業務集團合作,超過300名研究人員將以數字化為重點,開發新的技術、產品與解決方案。
全面攜手客戶前行
中國制造業正經歷從“中國制造”向“中國智造”的轉型,西門子能夠幫助制造企業提高生產效率和靈活性,加快產品上市速度。2015年,西門子深化與優秀的鋁合金汽車零配件制造商——中信戴卡股份有限公司的合作,為其提供完整的數字化企業解決方案(以產品生命周期管理軟件(PLM)、制造執行系統(MES)和全集成自動化(TIA)為核心的西門子數字化企業軟件套件),以及相關的電氣及信息化工程服務和技術支持,以幫助中信戴卡打造真正的數字化工廠。
同時,西門子與規模大的亞麻紗制造商之一——金達控股有限公司攜手,共同建設新的數字化工廠。西門子向金達控股及其生產基地提供了Simatic IT等數字化工廠解決方案,幫助其提升企業管理水平、生產效率和產能,向高級的*制造企業邁進。
在過程工業領域,西門子專注為客戶帶來長期效益,提高投資回報率。2015年10月,西門子與賽鼎工程有限公司簽訂戰略合作框架協議,雙方將強強聯手打造煤化工領域的“工業4.0”解決方案。西門子從一體化工程到一體化運營的解決方案將在賽鼎得到全面應用,并為賽鼎的數字化之路保駕護航。
同時,西門子響應中國政府發展新能源汽車行業的倡議,與北京汽車集團有限公司簽署協議建立合資公司,生產電驅動動力總成,將為中國市場帶來更多新能源汽車驅動技術。
作為中國能源行業忠實的合作伙伴,提升能源效率并減少溫室氣體排放一直是西門子長期以來追求的目標。2016年,西門子獲得在中國的首份4臺SGT-800型燃氣輪機的訂單。這些燃氣輪機將用于山西國新能源在保德和昔陽的分布式能源項目。這兩座熱電聯產發電廠(CHP)的總裝機容量將達近300兆瓦。
在發電服務方面,西門子大力推進服務本地化,旨在幫助中國客戶提高運營效率并降低風險。2015年,西門子與浙江蕭山發電廠簽訂了一份長期維護服務合同(LTP)。通過對蕭山發電廠5號機組燃氣輪機的LTP協議,西門子將繼續為確保電廠優性能和生命周期資產大化提供支持,實現合作共贏。
同時,西門子為北京京能高安屯燃氣熱電有限責任公司(高安屯熱電)的電廠提供了量身定制的燃氣輪機升級改造,助力高安屯熱電成為中國同類F級燃氣輪機熱電聯產應用的新*并榮獲“2015年亞洲電力獎年度優秀電廠改造項目銅獎”。
目前,風電已成為重要的可再生能源資源之一。2015年3月,西門子風力發電葉片(上海)有限公司生產的B63葉片正式出廠。這是西門子在中國本地生產的批B63葉片,也是目前中國市場上批量生產的長的風機葉片。
面對能源系統的諸多挑戰,西門子為中國的電力公共事業、工業、基礎設施和樓宇提供所需的產品及解決方案,建設更智能和穩定的電網基礎設施。2015年,由西門子提供主要電氣設備并組裝的*五臺110千伏預裝式移動變電站在武漢順利出廠。它能助力在短時間內快速恢復電力供應,有效減少因電力中斷帶來的經濟損失,幫助變電站實現信息化、,在快速增長的數據中心市場,西門子憑借在電力解決方案方面的豐富經驗斬獲了重要訂單,包括為中國建設銀行(北京)數據中心提供逾1000臺Sivacon S8低壓開關柜。該項目是中國目前大的金融T4級(數據中心標準的高級別,代表基建的安全性、穩定性和可靠性)數據中心。同時,西門子還為騰訊深圳濱海大廈數據中心提供了覆蓋高中低壓和樓宇的一站式產品。
西門子還在交通、樓宇、城市基礎設施等方面積極推動中國現代城市化的進程。2015年9月,西門子在中國一個綜合交通管理項目——珠海市綜合交通管理平臺一期工程正式通過驗收。該平臺引入西門子為珠海量身定制的“綠色交通指標體系”,通過整合所有市民出行相關的交通信息,實時收集、篩選和分析海量數據,不僅能有效為城市管理者提供決策量化依據和標準,也為市民出行提供實實在在的便利。
此外,西門子攜手中國南車株洲電力機車有限公司獲得為武漢首條有軌電車線路的21列100%低地板有軌電車提供核心部件的訂單。這一項目將更好地滿足城市公共交通的多樣性需求,*公交系統與地鐵系統間的運量空白。
一、概述
S120 有兩種形式:
用于多軸系統的 DC/AC 裝置
用于單軸系統的 AC/AC 裝置
這兩種形式的 Firmware V2.4 及以上版本都已具備基本定位功能。當前V2.4 版本的 S120具有如下定位功能:
? 點動 (Jog): 用于手動方式移動軸,通過按鈕使軸運行至目標點
? 回零 (Homing/Reference):用于定義軸的參考點或運行中回零
? 限位 (Limits):用于限制軸的速度、位置。包括軟限位、硬限位
? 程序步 (Traversing Blocks): 共64個程序步,可自動連續執行一個完整的程序也可單步執行
? 直接設定值輸入/手動設定值輸入 (Direct Setpoint Input / MDI):目標位置及運行速度可由上位機實時控制。
使用 S120 基本定位功能的前提條件:
調試軟件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本
硬件版本:SINAMICS FW: V2.4 HF2 或更高版本
注:
安裝 SCOUT V4.0 需要STEP 7 版本至少為 V5.3.3.1 以上
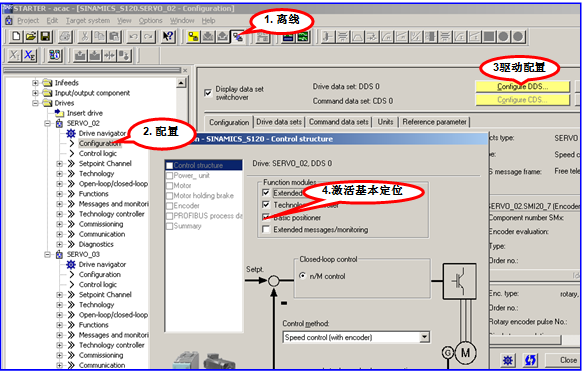
二、激活基本定位功能
S120的定位功能必須在變頻器離線配置中激活,步驟如下:
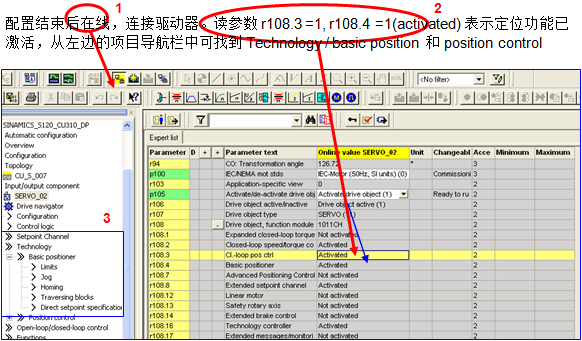
定位功能激活后可使用STARTER中的控制面板或專家參數表進行設置
定位功能激活后可使用STARTER中的控制面板或專家參數表進行設置
使用控制面板 使用專家參數表
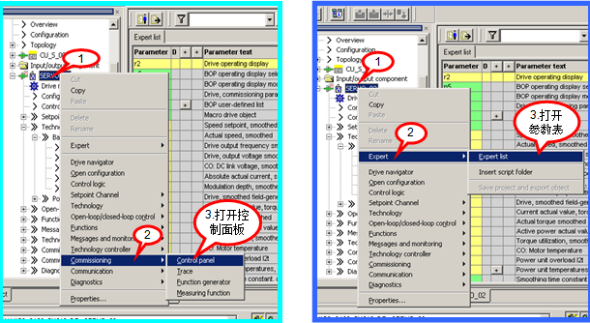
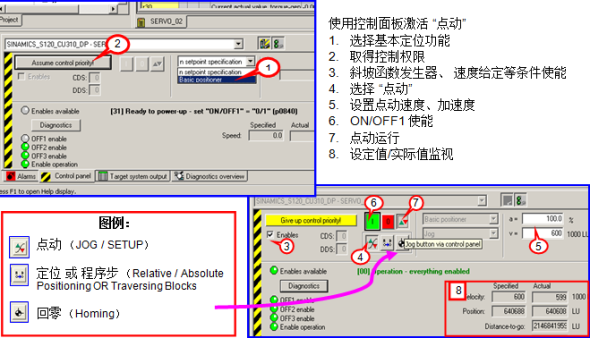
使用控制面板的操作步驟:
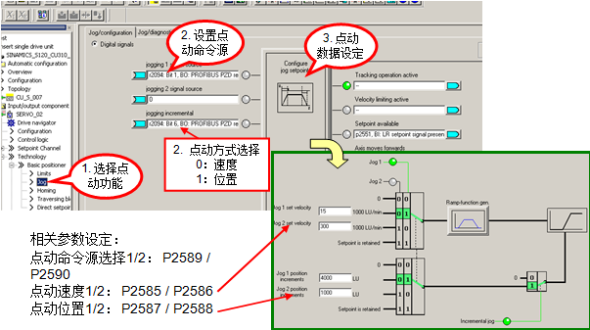
三、基本定位_點動(JOG)
S120 中基本定位功能的點動有兩種方式:
? 速度方式( travel endless):點動按鈕按下,軸以設定的速度運行直至按鈕釋放。
? 位置方式( travel incremental):點動按鈕按下并保持,軸以設定的速度運行至目標位置后自動停止。
? 使用控制面板的點動功能僅限于速度方式,位置方式需使用專家參數表設定。
? 執行點動功能,應先使能變頻器ON/OFF1(P0840)
四、基本定位_回零(Homing / Reference)
回零/尋參(Homing / Reference)
回參考點模式(回零模式)只有使用增量編碼器(旋轉編碼器 Reserver、正/余弦編碼器Sin/Cos 或 脈沖編碼器)時需要,因每次上電時增量編碼器與軸的機械位置之間沒有任何確定的關系。因此軸都必須被移至預先定義好的零點位置。即執行 Homing 功能。
當使用編碼器 ( Absolute ) 時每次上電不需重新回零。
S120 中回零有三種方式:
? 直接設定參考點 (Reference): 對任意編碼器均可
? 主動回零 (Reference point approach): 主要指增量編碼器
? 動態回零 (Flying Reference):對任意編碼器均可
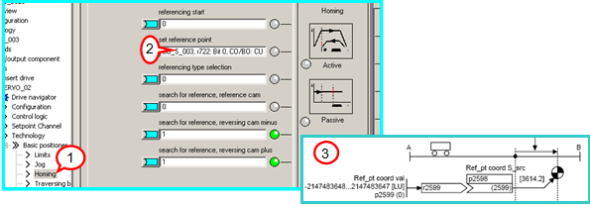
4.1設置參考點 (Set_Reference)
通過用戶程序可設置任意位置為坐標原點。通常情況下只有當系統即無接近開關又無編碼器的零脈沖時,或者當需要軸被設置為一個不同的位置時才使用該方式
 江西西門子代理商
江西西門子代理商
操作步驟(已設定開關量輸入點 DI2 為ON/OFF1命令源 P840)
1. 進入“Homing”
2. 連接一數字量輸入點 ( DI 1 )至參數 P2596作為設置參考點信號位,該位上升沿有效
3. 設定參考點位置坐標值 P2599(如 0)
4. 閉合DI 2運行使能
5. 閉合DI 1 激活“設置參考點”命令,于是該軸當前位置 r 2521 立即被置為P2599 中設定的值。如 r2521=0
4.2主動回零(Active Homing)
主動回零方式只適用于增量編碼器,值編碼器只需在初始化階段進行一次編碼器校準,以后不必做回零
主動回零有三種方式:
僅用編碼器零標志位( Encoder Zero Mark ) 回零
僅用外部零標志( External Zero Mark ) 回零
使用接近開關 + 編碼器零標志位( Homing output cam + Zero Mark ) 回零
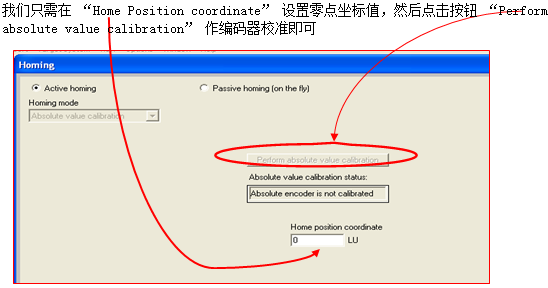
4.2.1值編碼器的主動回零
如果我們使用值編碼器并且作主動回零時會看到如下頁面:
4.2.2增量編碼器的主動回零
依下圖所示進行配置
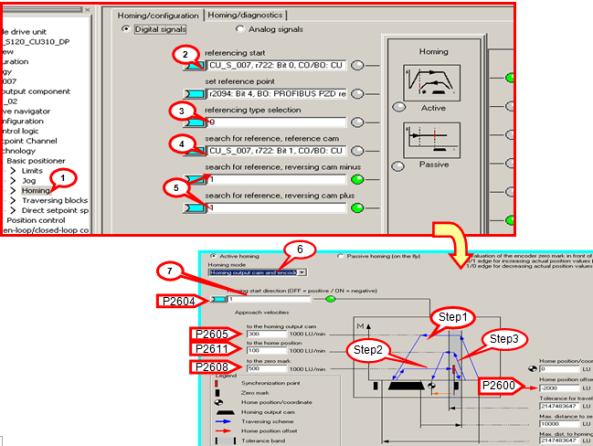
相關參數設定
1. 進入 “ Homing “ (回零) 頁面
2. 定義開關量輸入點DI 1為開始尋參命令(參數P2595=722.0)
3. 回零方式選擇主動回零P2597=0
4. 定義開關量輸入點DI 2為接近開關 P2612= 722.1(粗脈沖)
5. 軸運行極限點,如果回零過程中極限點到達(P2613/P2614=0)則軸反轉。若兩點全為零則軸停止。
6. 回零方式:接近開關 + 編碼器零脈沖
7. 回零開始方向P2604 (0:正向;1:反向)
動作過程:
變頻器運行ON/OFF1閉合,DI 1閉合,開始尋參過程
? 上圖中(Step1)軸按照P2604 定義的搜索方向,以大加速度 P2572 加速至搜索速度 P2605,到達接近開關后(DI 2 閉合),以大減速度P2573減速停止,進入下一步:搜索編碼器的零脈沖
? 軸反向加速至速度 P2608,離開接近開關后(DI 2 斷開)遇到的編碼器的*個零脈沖后軸停止。進入下一步:回參考點
? 上圖中(Step3)軸反向加速以速度 P2611運行偏置距離P2600后停止在參考點,完成主動回零過程。
4.3動態回零(Passive Homing)
Passive Homing (動態回零)又稱為 Homing on the fly
動態回零用于軸工作于任意定位狀態時動態修改當前位置值為零(如:在點動時、執行程序步時,執行 MDI 時),執行動態回零后并不影響軸當前的運行狀態,軸并不是真正的回到零點而只是其當前位置值被置為0,重新開始計算位置。
前提條件:P2597=1
值編碼器的動態回零:

參數設定
? 打開 “ Homing “ (回零) 頁面
? 定義開始尋參命令P2595源(如開關量輸入點DI2)
? 回零方式選擇動態回零P2597=1
? 接近開關Bero為上升沿有效(如上圖中P2511)
? 定義開關量輸入點DI 10(只能為快速I / O)為接近開關 P488= 722.10(如上圖中2)
動作過程:
? 變頻器運行(使能ON/OFF1),選擇任意一種命令(如點動,程序步、MDI等)軸按照所選擇的方式運行
? 閉合DI 2,開始動態回零
? 閉合快速開關DI 10(下圖中紅色線為該開關狀態),可見到位置實際值立即恢復為0,后重新計值(如圖中綠色線所示),在整個動態回零過程中軸的運行速度不受影響。

五、基本定位_限位(Limit)
S120 中包含兩種限位功能:軟限位、硬限位。以限制軸運行范圍。同時還有對軸運行速度,加減速的限制。
如下圖所示激活限位方式
? 項目導航欄中選擇限位功能塊
? 激活軟限位P2582 =1,正/反向位置范圍通過 P2578, P2579設定
? 激活硬限位P2568 =1,硬限位位置開關源 P2569, P2570
? 大速度:P2571、大加速度:P2572、大減速度:P2573

注:限位開關信號為 “ 低 “ 有效
到達硬限位后軸將以大減速度 P2573 故障停車,即使故障復位后也只允許反向運行
六、基本定位_程序步(Traversing Blocks)
通過使用Traversing Blocks _ “程序步” 模式可以自動執行一個完整的定位程序,也可實現單步控制;各程序步之間可通過數字量輸入信號切換。但只有當前程序步執行完后下一程序步才有效。
在S120 中提供了多 64個程序步供使用。

程序步執行步驟:
1. 項目導航欄中選擇 Traversing Blocks 模式,設定開關量輸入點DI4用于激活程序步功能
2. 不拒絕任務 P2641= r722.2=1、沒有停止命令 P2640=1
運行過程中P2640=0發出停止命令,則軸將以減速度P2620減速停車。
若斷開DI 3 ( r722.2=0 )發出拒絕任務命令,則軸將以大減速度P2573減速停車。
3. 按工藝需要設定各個程序步參數,程序步代號決定程序的執行順序。代號為 -1表示該步不執行(初始代號全部為 -1)。
4. 通過6個數字量輸入點的不同組合選擇需要的程序步
5. 變頻器運行,閉合DI 4(r722.3=1)激活 Traversing 方式 ( P2631=1有效 )軸按設定步驟運行。

結構說明:
P2616 (No.) 每個程序步都要有一個任務號,運行時依此任務號順序執行 ( -1 表示無效的任務)
P2621 (Job ) 表示該程序步的任務。有7 種任務供選擇:Positioning (位置方式)、Endless_POS / Endless_NEG(正 / 反向速度方式)、Waiting(等待parameter 中的時間后執行下一步) Goto(跳轉到parameter中的程序步) Set_O / Reset_O(置位/復位parameter 中的開關量輸出點)
P2622 ( Parameter ) 依賴于不同的Job,對應不同的Job有不同的含義(參見List Manual)
P2623.8/9 ( Mode ) 定義定位方式,僅當任務 ( Job )為位置方式 ( Position ) 時有效
P2617/P2618/P2619/P2620 ( Position, Velocity, Acceleration, Deceleration ) 運動的位置,速度,加/減速
P2623.4/5/6 ( Advance ) 制定本任務結束方式。END: 本任務結束不連續執行下一任務,Continue_With_Stop: 本任務結束準確定位,電機停止后重新啟動開始下一任務。Continue_Flying: 本任務結束連續執行下一任務。
P2623.0 ( Hide ) 跳過本條程序步不執行該任務。
依賴于 Job 的方式,Configuration of digital output 僅當Job 設定為 SET_O / RESET_O時有效,用于設定開關量輸出。
示例:
編制一段程序:
以速度 700 LU/min, 加 / 減速為100% 運行相對位置 50000 LU 減速停止;等待 30ms;再以速度 600 LU/min, 加 / 減速為100% 運行相對位置 40000 LU 減速停止。
編制程序步如下:


七、手動數據輸入(MDI)
Direct Setpoint Input / MDI (直接設定點輸入方式/手動數據輸入方式), MDI 的縮寫來自于 NC 技術“Manual Data Input ”
使用MDI 功能我們可以很輕松地通過外部控制系統來實現復雜的定位程序,通過由上位機控制的連續變化的位置、速度來滿足我們的工藝需要。
MDI 有兩種不同模式:
? 位置 ( position) 模式 P2653=0、
? 手動定位或稱速度模式( setting up ) P2653=1這兩種模式可在線切換
速度模式是指軸按照設定的速度及加/減速運行,不考慮軸的實際位置。
位置模式是指軸按照設定的位置、速度、加/減速運行;
位置模式又可分為位置 (P2648=1)和 相對位置( P2648=0)兩種方式。
7.1 MDI 模式配置如下圖所示

7.2 激活 MDI 方式及參數配置
1. 進入直接數據輸入/ MDI 模式
2. 如上面程序步中所述:不拒絕任務 P2641=1、沒有停止命令 P2640=1
運行過程中可通過斷開聯接與P2640的外部開關發出停止命令,則軸將以減速度P2620減速停車。
若斷開聯接與P2641的外部開關發出拒絕任務命令,則軸將以大減速度P2573減速停車
3. 設定開關量輸入點DI 9用于激活MDI功能(P2647為“1”有效)
4. 相關數據設置位置、速度、加 / 減速度 P2642 ~ P2645)

5. 位置模式選擇 P2653
P2653=1:速度方式;P2653=0:位置方式
6. 定位方式選擇 P2648
位置方式:P2654=0, P2648=1;相對定位方式:P2654=**1*(16H)
7. 方向設定源 P2651、P2652
8. 數據傳輸形式 (P2649) 及數據設定值確認命令源( P2650)
S120 中MDI 的數據傳輸可采用兩種形式:
連續傳輸 P2649=1
單步傳輸、由上升沿確認 P2649=0
? 所謂單步傳輸是指MDI 數據的傳輸依賴于參數 P2650 中選擇的開關量信號。該命令為 “沿” 有效,每次執行完一個機器步后,需要再次施加上升沿,新的速度、位置等才能有效。
? 與單步傳輸不同,一旦激活連續數據傳輸,MDI 數據(位置、速度、加 / 減速度)可連續修改且立即有效而無需開關使能。這樣我們就可通過上位機實時調整目標位置及軸的運行速度、加 / 減速度而不會停機
注:連續數據傳輸僅適用于定位方式
7.3 調試參數
運行命令源 (ON/ OFF1)為 P840
不拒絕數據傳輸: P2641=1
無停止命令: P2640=1
MDI 位置模式: P2653=0/1
選擇傳輸模式: P2649=0/1
數據設定值確認命令源 P2650 ( P2649=1時無效)
激活MDI 模式的命令源 P2647
選擇定位方式: P2648=1
設置目標參數:P2690、P2691、P2692、P2693
變頻器運行后,激活MDI模式,軸按設定值運行。
 化工儀器網
化工儀器網