 化工儀器網
化工儀器網










詳細介紹
那里有賣西門子EMAM03模塊
6ES7288-3AM03-0AA0
SIMATIC S7-200 SMART, 模擬 I/O SM AM06,2AI/1AO, 0..10V,0..5V,0/4..20mA,+/-5V, +/-2.5V,12 Bit 分辨率 或 4...20mA,+/-10V, 11 Bit 分辨率
說明

S7-300 CPU 的六個性能等級
現有性能范圍極寬的分級 CPU 系列,可用于組態控制器。
產品范圍包括 7 種標準的 CPU、
7 種緊湊式 CPU、5 種故障防護型 CPU 以及 3 種工藝 CPU。
現有 CPU 的寬度僅 40mm
SIMATICS7-300 是我們全集成自動化設計的一部分,是銷量大的控制器。
應用范圍
在*個實例中,SIMATIC S7-300 用于制造工藝中的創新性系統解決方案,特別是用于汽車工業,一般機械工程,特別是特殊機械制造和機器的連續生產 (OEM),以及塑料加工、包裝行業、食品和飲料工業和加工工程
作為一種多用的自動化系統,S7-300 是那些需要靈活的設計以實現集中和本地組態的應用的理想解決方案。
對于由于環境條件限制需要特殊的堅固性的應用,我們可以提供SIPLUS 設備。
特別是在后期加工工藝上,S7-300 可以用于以下行業:
汽車工業
通用機械工程
特殊機器制造
系列機械工程,OEM
塑料加工
包裝行業
食品和飲料工業
加工工程
快速計數/fairs,可以直接訪問硬件計數器
簡單定位,直接控制 MICROMASTER 頻率靜態變頻器
帶有集成功能塊的 PID-Regulation
優點
由于具有高處理速度,CPU 可以實現非常短的機器循環時間。
S7-300 系列 CPU 可以為各種應用提供合適的解決方案,客戶只需為特定任務實際需要的性能付款
S7-300 建立在模塊式的組態上,無需 I/O 模塊的插槽規則
現有豐富的模塊可用于集中組態和搭配 ET 200M 實現分布式組態。
集成的 PROFINET 接口可以實現控制器的簡單網絡化,與其它運行管理等級方便的進行數據交換
模塊寬度窄,可以實現緊湊式的模塊設計或者小型控制柜。
能夠把強大的 CPU 與工業以太網/PROFINET 接口、集成的工藝功能或故障防護設計集成在一起,從而避免附加投資。
設計和功能

桌面 CPU 創新
設計
S7-300 可以實現空間節省和模塊式組態。除了模塊,只需要一條 DIN 安裝軌用于固定模塊并把它們旋轉到位。
這樣就實現了堅固而且具有 EMC 兼容性的設計。
隨用隨建式的背板總線可以通過簡單的插入附加的模塊和總線連接器進行擴展。S7-300 系列豐富的產品既可以用于集中擴展,也可用于構建帶有 ET 200M 的分布式結構;因此實現了經濟高效的備件控制。
擴展選件
如果自動化任務需要超過 8 個模塊,S7-300 的中央控制器 (CC) 可以使用擴展裝置 (EU) 擴展。中心架上多可以有 32 個模塊,每個擴展裝置上多 8 個。接口模塊 (IM) 可以同時處理各個機架之間的通訊。如果工廠覆蓋范圍很寬,CC/EU 還可以相互間隔較長距離安裝(長 10m)。
在單層結構中,這可以實現 256 個 I/O 的大組態,在多層結構中多可以達到 1024 個 I/O。在帶有 PROFIBUS DP 的分布式組態中,可以有 65536 個 I/O 連接(多 125 個站點,如通過 IM153 連接的 ET200M)。插槽可自由編址,因此無需插槽規則。
S7-300 模塊種類豐富,還可以用在分布式自動化解決方案中。
與 S7-300 具有相同結構的 ET 200M I/O 系統通過接口模塊不僅可以連接到 PROFIBUS 上還可以連接到 PROFINET 上。
西門子MM4系列變頻器都集成了串行接口,支持USS通信協議,通過USS協議可以對變頻器進行控制和讀寫變頻器參數。使用S7-300PLC有以下兩種通訊方案:
1. 按照USS協議要求編寫通訊報文,計算BCC校驗,適用于從站數量比較少,較簡單的應用;
2. 采用DriveES SIMATIC軟件提供的S7-300庫程序,自動生成從站輪詢表程序,適用于從站數量比較多,較復雜的應用。
本文主要介紹通過*種方案實現CPU314-2PtP與MM440的USS通訊。使用S7-300編寫USS通訊程序分為以下幾個步驟:
1. 依據USS協議編寫報文;
2. 使用S7-300提供的串口數據發送程序發送USS報文;
3. 使用S7-300提供的串口數據接收程序接收USS報文;
4. 依據USS協議分析接收到的報文。
本文根據這4個步驟編寫了如下內容:第1節簡單介紹USS協議內容,了解USS協議報文格式;第2節根據USS協議列舉了4條報文;第3節介紹PLC和變頻器USS通訊的硬件組態;第4節介紹通過調用PLC中的發送和接收功能塊實現USS協議報文的發送和接收。
1 USS協議介紹
USS協議是西門子專為驅動裝置開發的通信協議。USS的工作機制是,通信是由主站發起,USS主站不斷循環輪詢各個從站,從站根據收到的指令,決定是否響應主站。從站不會主動發送數據。從站在以下條件滿足時應答主站:接收到主站報文沒有錯誤,并且本從站在接收到主站的報文中被尋址,上述條件不滿足或者主站發出的是廣播報文,從站不會做任何響應。USS的字符傳輸格式為11位,其中1位起始位、8位數據位、1偶校驗、1位停止位。如下表所示:
| 起始位 | 數據位 | 校驗位 | 停止位 | |||||||
| 1 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 偶X1 | 1 |
| LSB | MSB | |||||||||
USS字符幀結構
USS協議的報文由一連串的字符組成,協議中定義了它們的功能,如下表所示:
| STX | LGE | ADR | 有效據區 | BCC | ||||
| 1 | 2 | 3 | … | n | ||||
USS報文結構
? STX:長度1個字節,總是為02(Hex),表示一條信息的開始;
? LGE:長度1個字節,表明在LGE后字節的數量,上表中黃色區域長度;
? ADR:長度1個字節,表明從站地址;
? BCC:長度1個字節,異或校驗和,USS報文中BCC前面所有字節異或運算的結果;
? 有效數據區:由PKW區和PZD區組成,如下表所示。
| PKW區 | PZD區 | ||||||||
| PKE | IND | PWE1 | PWE2 | … | PWEm | PZD1 | PZD2 | PZD1 | PZDn |
USS有效數據區
PKW區用于主站讀寫從站變頻器參數:那里有賣西門子EMAM03模塊
? PKE:長度一個字,結構如下表,任務或應答ID請參考《MM440使用大全》第13章。
Bit15- Bit 12 Bit 11 Bit 10-Bit 0
| Bit15- Bit 12 | Bit 11 | Bit 10-Bit 0 |
| 任務或應答ID | 0 | 基本參數號PNU |
PKW結構
變頻器參數號<2000時,基本參數號PNU=變頻器參數號,例如P700的基本參數號PNU=2BC(Hex)(700(Dec)=2BC(Hex))。
變頻器參數號>=2000時,基本參數號PNU=變頻器參數號-2000(Dec),例如P2155的基本參數號PNU=9B(Hex)(2155-2000=155(Dec)=9B(Hex))。
? IND:長度一個字,結構如下表。
| Bit15- Bit 12 | Bit 11- Bit 8 | Bit 7 - Bit 0 |
| PNU擴展 | 0(Hex) | 參數下標 |
IND結構
變頻器參數號<2000時,PNU擴展=0(Hex)。
變頻器參數號>=2000時,PNU擴展=8(Hex)。
參數下標,例如P2155[2]中括號中的2表示參數下標為2。
? PWE:讀取或寫入參數的數值
PZD區用于主站與從站交換過程值數據:
? PZD1: 主站?從站 控制字
主站?從站 狀態字
? PZD2: 主站?從站 速度設定值
主站?從站 速度反饋值
? PZDn: MM430/440支持多8個PZD,MM420支持多4個PZD
根據傳輸的數據類型和驅動裝置的不同,PKW和PZD區的數據長度不是固定的,可以通過P2012、P2013 設置。本例采用4PKW,2PZD報文格式。
2 USS協議報文定義
本文通過發送4個不同功能的報文來演示自定義USS報文的方法,USS協議詳細說明請參照《MM440使用大全》第13章。
例1.把參數P2155[2]的數值修改為40.00Hz
| 字節數 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 發送報文 | 2 | 0E | 1 | 30 | 9B | 80 | 2 | 42 | 20 | 0 | 0 | 4 | 7E | 0 | 0 | 3C |
| 應答報文 | 2 | 0E | 1 | 20 | 9B | 80 | 2 | 42 | 20 | 0 | 0 | FB | 31 | 0 | 0 | 9C |
報文解釋:
| STX | Byte1 | 起始字符 |
| LGE | Byte2 | 報文長度(字節3到字節16共14個字節) |
| ADR | Byte3 | 從站地址 |
| PKW | Byte4-5 | PKE內容: |
| Bit15- Bit 12(任務ID) =3(Hex),修改參數數值雙字 | ||
| Bit15- Bit 12(應答ID) =2(Hex),傳送參數數值雙字 | ||
| Bit10- Bit 0(基本參數號PUN)=2155-2000(Dec)=9B(Hex) | ||
| Byte6-7 | IND內容: | |
| Bit15- Bit 12(PNU擴展) =8(Hex),參數號大于2000 | ||
| Bit7- Bit 0(參數下標)=2(Hex),P2155[2] | ||
| Byte8-11 | 參數值,42 20 00 00(Hex)=40.0(浮點數) | |
| PZD | Byte12-13 | PZD1 |
| Byte14-15 | PZD2 | |
| BCC | Byte16 | 異或校驗和 |
注:黃色標記表示應答報文中的內容
例2.讀取參數P0700[0]的數值
| 字節數 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 發送報文 | 2 | 0E | 1 | 12 | BC | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 7E | 0 | 0 | D9 |
| 應答報文 | 2 | 0E | 1 | 12 | BC | 0 | 0 | 0 | 0 | 0 | 5 | FB | 31 | 0 | 0 | 6C |
報文解釋:
| STX | Byte1 | 起始字符 |
| LGE | Byte2 | 報文長度(字節3到字節16共14個字節) |
| ADR | Byte3 | 從站地址 |
| PKW | Byte4-5 | PKE內容: |
| Bit15- Bit 12(任務ID) =1(Hex),讀取參數數值 | ||
| Bit15- Bit 12(應答ID) =1(Hex),傳送參數數值單字 | ||
| Bit10- Bit 0(基本參數號PUN)=700(Dec)=2BC(Hex) | ||
| Byte6-7 | IND內容: | |
| Bit15- Bit 12(PNU擴展) =0(Hex),參數號小于2000 | ||
| Bit7- Bit 0(參數下標)=0(Hex),P700[0] | ||
| Byte8-11 | 參數值,5(Hex)=5(Dec) | |
| PZD | Byte12-13 | PZD1 |
| Byte14-15 | PZD2 | |
| BCC | Byte16 | 異或校驗和 |
注:黃色標記表示應答報文中的內容
例3.不需要讀寫參數只發送停止變頻器報文
| 字節數 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 發送報文 | 2 | 0E | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 7E | 0 | 0 | 77 |
| 應答報文 | 2 | 0E | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | FB | 31 | 0 | 0 | C7 |
例4.不需要讀寫參數只送啟動變頻器、設定頻率50Hz報文
| 字節數 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| 發送報文 | 2 | 0E | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 7F | 40 | 0 | 36 |
| 應答報文 | 2 | 0E | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | FF | 34 | 3F | FF | 6 |
例3、4報文比較簡單只需要定義PZD中的內容,PKW區內容可以設置為0。
請注意:如果按照以上4個例子發送報文可能會收到與例子中不一樣的應答報文,這并不代表報文存在問題,可能由于變頻器狀態不同或參數設置不同造成。例子報文中已經計算了BCC校驗的值,如果使用其他的報文需要自己計算BCC校驗。
3 硬件組態
MM4系列變頻器提供的串行接口為RS485接口,S7-300 PLC有3種通訊模塊支持RS485接口:
1. 采用帶有集成RS485接口的CPU例如CPU31X-2PtP;
2. RS485接口的CP340通訊模塊;
3. RS485接口的CP341通訊模塊;
以上三種模塊都可以通過下表中的接線方式與MM4變頻器連接,本文中采用1臺CPU314-2PtP與1臺MM440通訊。
| 信號 | CPU314-2PtP | MM430/MM440 | MM420 |
| RS485接口針腳 | 端子 | 端子 | |
| P+ | 11 | 29 | 14 |
| N- | 4 | 30 | 15 |
S7-300 RS485接口與MM440 USS接線
3.1 PLC硬件組態
1) 首先打開STEP7新建項目并插入CPU314-2PtP。
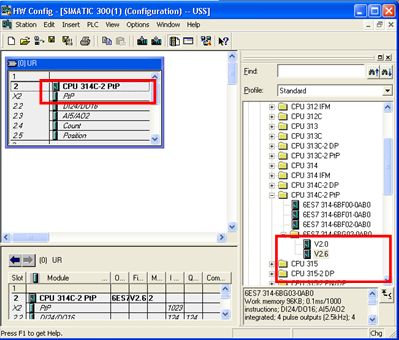
2) 雙擊CPU314-2PtP的X2端口PtP,打開PTP屬性對話框General欄,Protocol復選框中選擇“ASCII”協議。

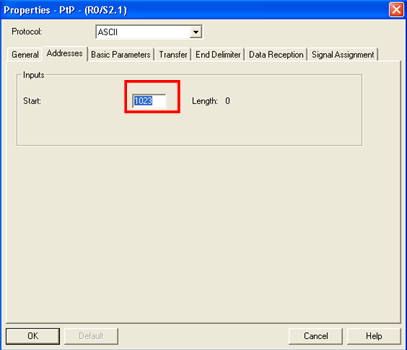
3) Addresses欄中記錄起始地址“1023”,在后面的編程中使用。
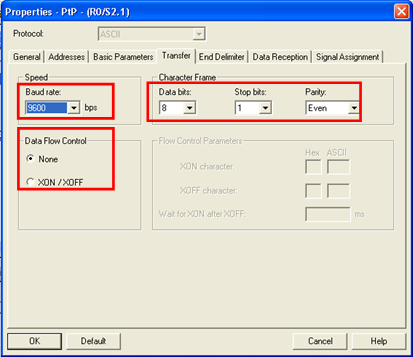
4) Transfer欄中設置通訊速率“9600bps”,報文格式:“8”位數據位,“1”位停止位,“Even”偶校驗,數據流控制選擇“None”。
5) End Delimiter欄中設置接收報文結束方式“After character delay time elapses”利用兩個報文的間隔時間來判斷報文是否結束,并設置字符延時時間“4ms”(該時間可使用默認設置,默認設置時間隨通訊速率不同時間也不同)。
憑借全新版本的TIA博途V15,西門子擴展了其全集成自動化工程軟件平臺,納入一系列實用的全新數字化功能,以縮短工程時間。其創新成果的主要有增加應用可能性、擴展數字化產品組合、實現標準化和提高工程效率。
TIA博途V15增加應用可能性的亮點在于其集成了高級語言應用及其它驅動系統的多功能平臺,其中包括安全驗收測試等;將操作功能和2D到4D運動學集成于Simatic S7-1500控制器,可連接并對機器人進行編程。Simatic S7-1500高級控制器產品系列中納入全新多功能平臺,目前能夠通過C/C++和Eclipse等商業編程工具輕松創建和重用高級語言應用。Sinamics S120及其他驅動產品系列的集成有助于實現西門子全系列驅動技術在TIA博途中的組態、調試和診斷。另一個亮點是針對Sinamics G驅動產品系列的向導指引型安全驗收測試。結合支持Simatic S7-1500高級控制器的CPU新技術,采用2D到4D運動學的操作功能現在可以在TIA博途中輕松高效地進行編程、模擬和調試,譬如Cartesian龍門架、卷取機、Scara機器人和Delta拾取機器人等。TIA博途V15還提供機器人功能。庫卡和安川等機器人制造商已將其數據塊庫用于在TIA博途中進行機器人編程。日本電裝(Denso)和瑞士史陶比爾(St?ubli)等其他制造商計劃在不久的將來發布數據塊庫。這樣,控制和機器人技術的發展更加緊密,而TIA博途則能帶來從工程到機器人操作等各環節的整體解決方案。
TIA博途V15關于數字化產品組合的擴展方面聚焦OPC UA功能和虛擬調試。OPC UA功能已針對Simatic S7-1500高級控制器進行了擴展。這可以改進和簡化工廠中機器設備與MES/SCADA/IT層級(制造執行系統/監控和數據采集)之間的標準化垂直和水平通信。另外,它還有助于自動化解決方案按照行業特定標準進行實施,如OMAC PackML(機械自動化與控制組織)或Weihenstephan(唯森)等。虛擬調試支持對自動化解決方案的虛擬驗證,也就是說控制組件與機器或系統的機電系統之間進行交互。該西門子解決方案的核心是支持Simatic S7-1500的S7-PLCSIM Advanced高級仿真器。這可以實現許多控制器功能的模擬和對虛擬系統模型的仿真測試。因此,自動化和機械工程在產品生命周期的早期階段便實現了同步,從開發到實際調試的時間都得到縮短。
在標準化和更高工程效率方面,全新版本的TIA博途重視團隊合作和擴展對設備和系統的診斷功能。通過TIA博途多用戶工程(TIA Portal Multiuser Engi-neering),在團隊合作中添加了對變更對象的自動標記和離線模式。新版本下多用戶服務器中強化的變更管理功能,如用于變更歷史記錄和用戶評論等,可以改進團隊內系統支持下的同步變更。對于設備和系統診斷,Simatic ProDiag診斷軟件包也進一步擴展,現已涵蓋對故障安全模塊的監控和針對ProDiag報警的標準分析。借助同樣已經得以擴展的Simatic HMI(人機界面)中的S7圖形控制顯示,直接改善了在系統的操作設備上對設備序列和應用錯誤的診斷及可視化顯示。譬如,用戶*能夠回查操作設備的圖形代碼顯示故障的真實原因。
背景信息:
2010年推出的西門子TIA博途(全集成自動化工程軟件平臺)使用戶能夠通過高效配置快速、直觀地執行自動化和驅動任務。其軟件平臺專為實現高效率和易用性而設計,同時適用于新老用戶。TIA博途為控制器、人機界面(HMI)和驅動器等提供了標準的工程理念,可分享統一的數據存儲和*的操作方式——譬如,在配置、通信和診斷期間的操作,并針對所有自動化對象提供強大的庫功能。TIA博途中簡易的工程實現方式,有助于完整的數字自動化,如數字化規劃、集成化工程和透明化操作等。TIA博途與PLM(產品生命周期管理)和MES(制造執行系統)軟件一起構成了西門子完整的“數字化企業軟件套件”,為企業邁向“工業4.0”奠定基礎。
 化工儀器網
化工儀器網