 化工儀器網
化工儀器網










詳細介紹
西門子6AG4112-2DK10-0AA0 西門子6AG4112-2DK10-0AA0
上海盟疆工業自動化設備有限公司工業業務領域致力于為客戶提供高品質的服務,追求客戶的滿意是我們始終如一的目標。在中國,工業業務領域擁有一支技術過硬、經驗豐富的工程師隊伍,為客戶提供7x24小時全天候服務。專業的服務人員和遍布全國的服務及備件網絡將對客戶的服務需求迅速作出響應,將由設備故障引起的損失降低到小的程度。
2017年2月底,就快過雞年春節了,某大廠停機檢修,其中有3臺變壓器控制柜需要更換繼保,計劃停機4天時間。原來品牌是AREVA(阿海琺)的,現在更換為西門子7SJ68系列。公司本想只供應產品的,但客戶要求負責安裝、調試。項目拿下來后,由于繼保我們沒調過,西門子這個裝置還必須用軟件調試,于是只能找有調試經驗的人了,找了一廠家,說可以做,談好價錢簽好合同,小項目應該不會有什么問題。
前期進場測量安裝尺寸,新舊產品安裝尺寸、接線對比,出圖紙,準備材料,萬事俱備,只欠停機了。停機了我們馬上進場,拆舊的裝新的,接線,加班加點一天完成了,通知廠家第二天安排技術人員過來。人到了,看了一下,說這個調試我們做不了哦,軟件我們也不會,我們只能做繼保測試、校驗。我傻眼了,立馬跟公司溝通,四處問人找人,沒人會調,找到會的也在國外調試,一時半會回不來。沒辦法了,只能自己試了。下載手冊、軟件,摸索軟件使用、參數設置,通訊等……,在線連接,怎么都連接不上(后來發現不是標準的串口線,針腳定義不一樣),都快急壞了,后來其他分廠有一條用過的線,借過來就連接上了,然后開始設置相關整定參數,輸出等,完了后讓專業的廠家做測試,校驗整定值。終順利完成,松了一口氣,可以放心回去過年了。
SIPROTEC裝置介紹
SIPROTEC 4 7SJ68 專為本地用戶設計。它提供了大屏幕顯示,全中文人機界面,因此調試和操作非常方便。
SIPROTEC 4 7SJ68用途廣泛,它可用在配電線、輸電線上作保護、控制和監視。可用于不同電壓等級的接地、小電阻接地、不接地或中性點補償接地的網絡。該裝置既適用于輻射網也適用于環狀網,既適用于單端供電線路也適用于多端供電的線路。7SJ68的基本功能是過流保護和方向過流保護。其時間特性曲線可以是定時限、反時限或用戶定義的。
SIPROTEC 4 7SJ68提供了方便易用的當地控制和自動化功能。控制開關的數量取決于可用的輸入/輸出的數量。集成的可編程邏輯工具(CFC)允許用戶實現自定義功能,如開關閉鎖。用戶也能生成自定義的信息。
SIPROTEC 4 7SJ68的人機界面是專為中國市場設計的,所有的界面標識和顯示信息全是中文的。
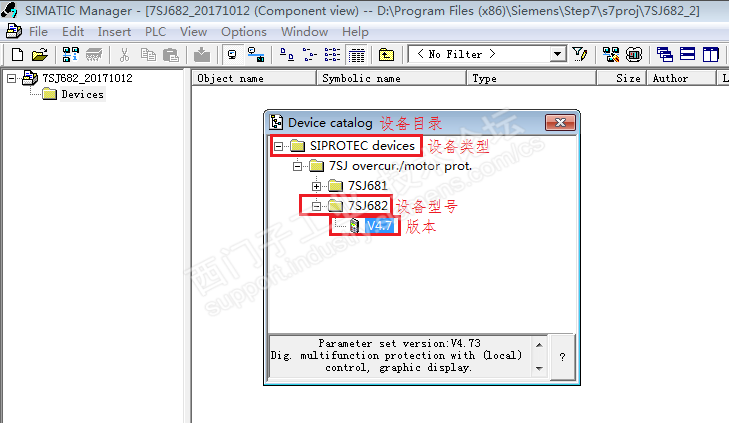
軟件DIGSI V4.91,這個軟件跟STEP7差不多的,先組硬件,然后配置相關參數,原來給客戶培訓整理了一些資料,順便也給大家大概介紹一下吧。

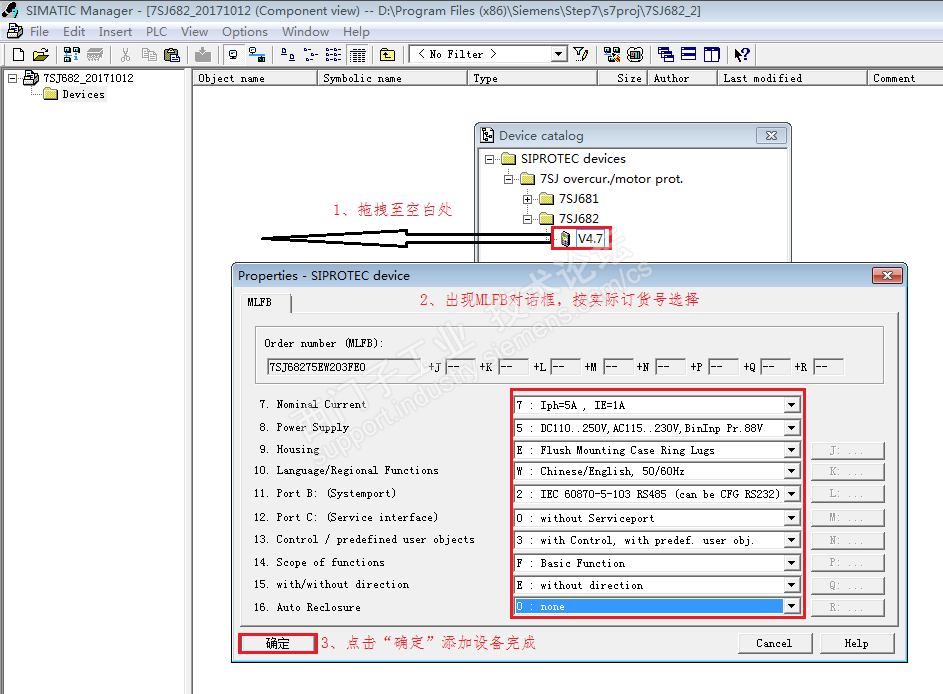
硬件組態
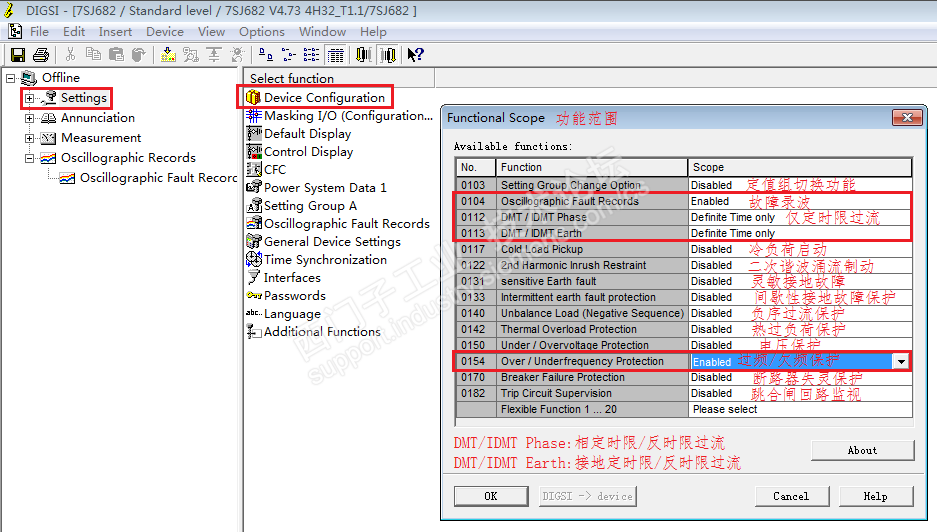
功能范圍設置
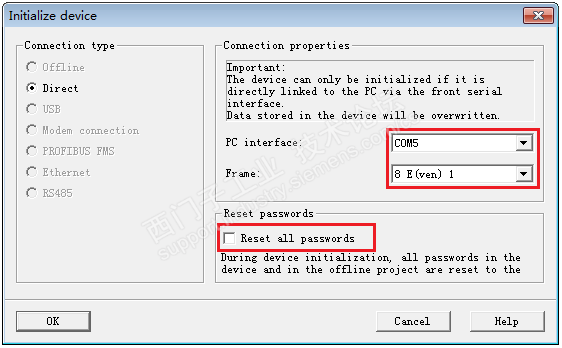
設置通訊參數,*次連接需要初始化
設置相關整定參數

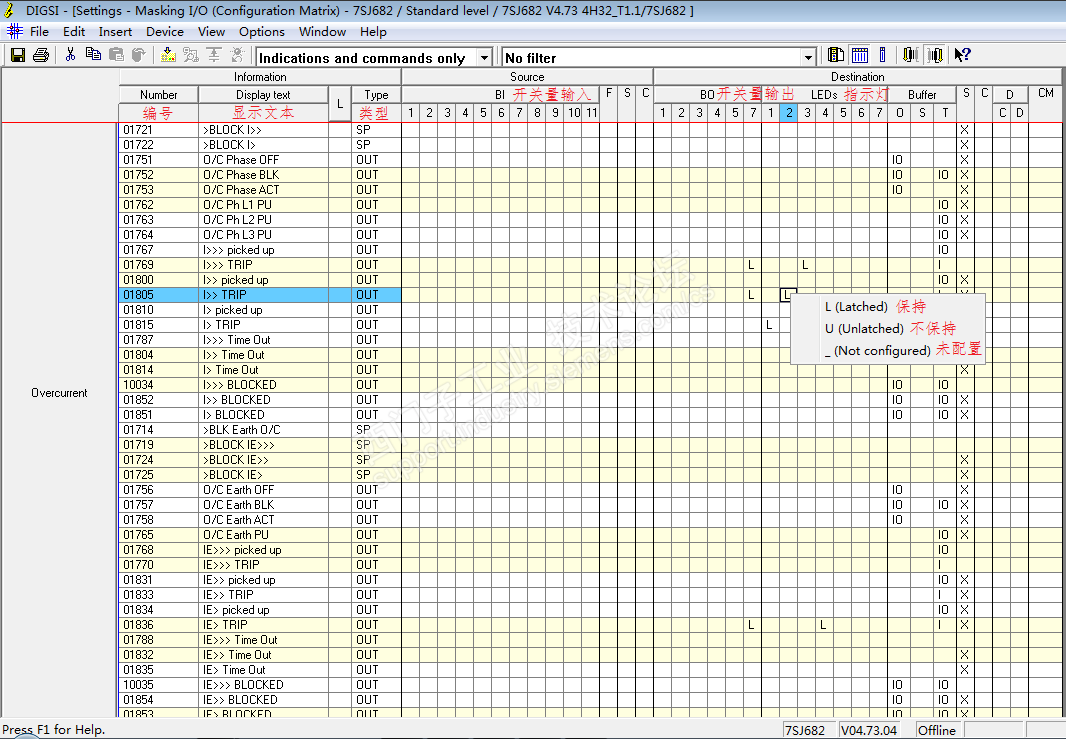
設置矩陣表,其實就是定義I/O
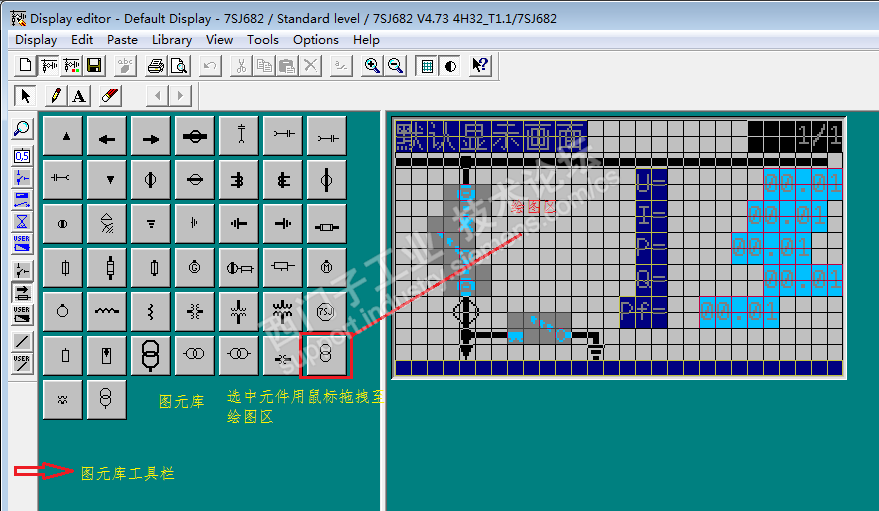
設置顯示界面
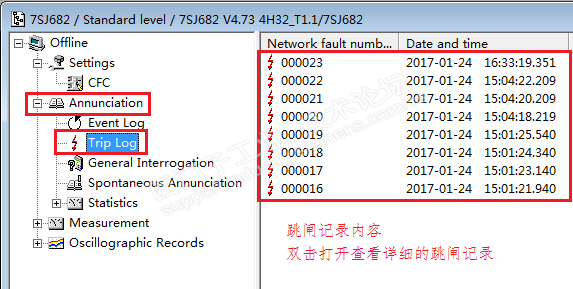
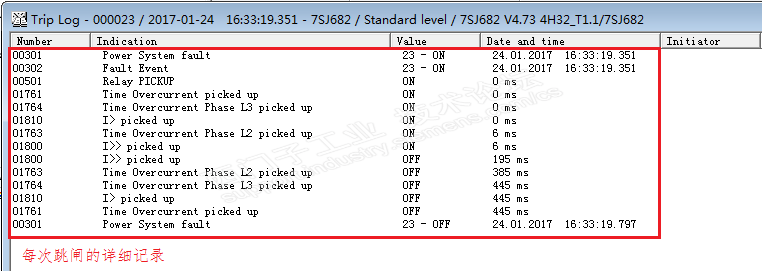
故障記錄
西門子7SJ68功能強大,這里用到的只是基本的功能。
后記:對于這種改造項目要很謹慎,時間緊迫又重要,隔行而隔山,連找人都沒途徑,對于專業/產品不熟悉,很容易出問題,萬一出點意外,罰款,聲譽受損……會損失慘重啊。
11月末東北已經正式進入冬季,天氣漸漸變冷,室內的溫度跟著室外溫度慢慢的降了下來。每年都有暖氣,室內不見得有多冷,今年就感覺特別的冷。雖然今年夏天辦公室增加了一臺空調,可是冬天到了,空調制熱的功能卻沒有夏天制冷的效果那么好。在有暖氣的地方待過的人都知道,要放放氣暖氣就熱了,今年無論怎么放,暖氣都是那樣。于是就想到了換熱系統是不是有問題了,進到控制室差的沒嚇死我,原來我們單位的換熱系統這么”、大氣、上檔次“。



看了一下,一個變頻器簡單的恒壓供給系統,變頻器還是一個國產的。壓力表一直沒起來,可是泵還時斷時續的轉,莫非這么一個簡單的東西還有別的地方影響?查吧,也沒有圖紙,我從來沒見過做的這么"優秀"的布線,真是給我震住了。找了一圈,使能信號一直有,泵停的時候也有。那就捋動力回路吧,捋到接觸器下邊時,發現了上圖中的下一排的東西,判斷應該是熱保吧,沒有銘牌,看著上邊有調節整定值的地方,不會是整定值不夠吧,運行了好幾年了整定值不能不夠啊,看看電機銘牌:

果然啊,整定值設置在2.5,整定值調大后問題解決。
沒見過這種熱保,還具有自動復位的功能,長見識啊!
1.1 基本概念
插補的概念源于數控機床。在數控機床中,刀具不能嚴格地按照要求加工的曲線(直線)運動,只能用折線軌跡逼近所要加工的曲線。機床數控系統依照一定方法確定刀具運動軌跡的過程,叫做插補。也可以說,已知曲線上的某些數據,按照某種算法計算已知點之間的中間點的方法,或者稱為“數據點的密化”。插補的動作過程:在每個插補周期(極短時間,一般為毫秒級)內,根據指令、進給速度計算出一個微小直線段的數據,刀具沿著微小直線段運動,經過若干個插補周期后,刀具從起點運動到終點,完成輪廓的加工。
路徑運動初來自于機器人和CNC領域,用機器人編程語言或G-Code編程。它是指在多維空間中,通過一組軸的協作動作,各軸之間無主從之分,它們按照設定的動態響應特性,實現路徑對象從起點到終點的的路徑軌跡運動。
路徑插補產生路徑的運行軌跡,計算插補周期內的路徑插補點,并通過機械運動系統轉換獲得對應插補周期內插補點的各路徑軸設定值。
隸屬于機械運動系統的單獨軸在S7 technology中被為路徑軸,路徑軸通過路徑對象執行路徑運動。參考圖1 路徑軸與路徑對象。
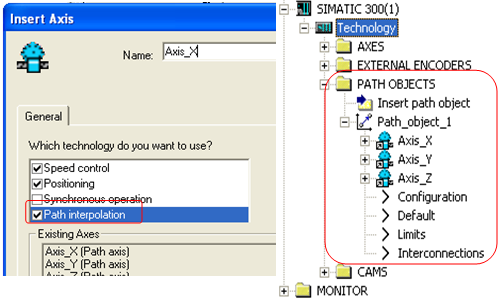
圖1 路徑軸與路徑對象
1.2 S7-Technology 路徑功能特點
S7-Technology 路徑插補功能概述:
> 從S7-Technology V4.2開始
> 允許進行3軸插補操作
> 路徑插補可以通過直線、圓弧、多項式表示實現
> Move Path命令可以組成連續運動
> 支持多種機械運動學模型
> 可以與外部位置值同步,實現傳送帶跟蹤功能
S7-Technology 路徑插補的技術特點:
> 所有的路徑軸都相互同步移動
> 所有的路徑軸都同時到達目標位置
> 路徑軌跡的移動,將會始終是以一個固定的合成速度進行 (如果動態
特性限制沒有被超越)
> 低速度性能的軸,決定了整個軌跡的高動態特性
路徑差補可以執行多3軸之間的2D或者3D的線性、圓弧或者多項式插補,路徑差補工藝對象(TO) ,適用于機械運動學控制范疇,一個共同的系統中,可以存在多個機械運動學控制結構。同步于路徑軸的“同步軸”,仍然可以實現同步控制,例如,旋轉,凸輪開關,測量功能。通過圖形化編輯器,可以簡便地設置機械運動學控制系統的參數;通過動態特性輪廓窗口,可以輕松定義路徑的動態特性;通過軌跡點表格,可以輕松定義路徑差補,計劃目的地路徑。另外還可以定義保護防撞區域和實現傳送帶位置的精確跟蹤。
1.3 機械運動系統的選擇
T-CPU 所實現運動學,等同于人們過去所熟悉機械運動學。可以將它們分為如下兩種不同的類型。參考圖2 在 T-CPU 中集成的機械運動學。
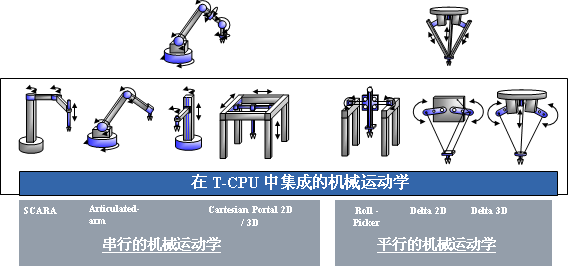
圖2 在 T-CPU 中集成的機械運動學
不同的機械運動系統可以實現TCP (Tool Center Point,工具中心點或機械運動端點)相同的路徑運動功能。盡管在某些情況下,不同的機械運動系統可實現相同的路徑運動,但是,如果機械運動系統選擇不合理,將有可能無法完成的路徑功能。所以,必須根據實際的工藝需求選擇合適的機械運動系統,并在工廠布局中考慮該機構的的合理安裝位置。參考圖3 不同機械系統的轉化。
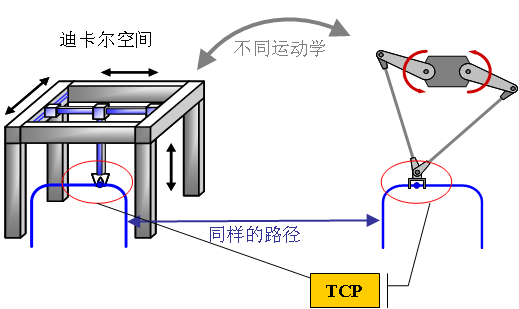
圖3 不同機械系統的轉化
2 路徑插補的實現方法
2.1 運動學模型簡介
常用的運動學模型請參考圖 4 運動學模型。
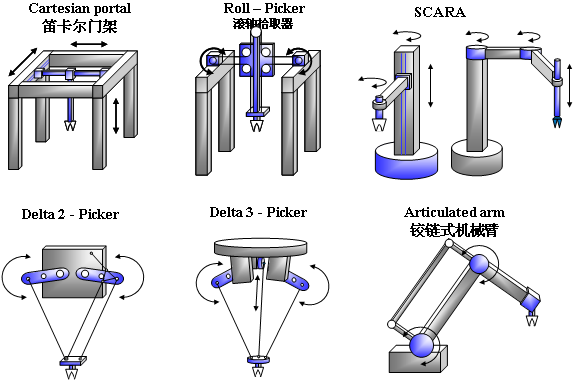
圖 4 運動學模型
下面介紹一些常用的運動學模型。直角坐標機器人 (英文名:Cartesian coordinate robot),大型的直角坐標機器人也稱桁架機器人或龍門式機器人,由多個運動自由度建成空間直角關系的、多用途的操作機器。工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動。因末端操作工具的不同,直角坐標機器人可以非常方便的用作各種自動化設備,完成如焊接、搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標、噴碼、打碼、(軟仿型)噴涂等一系列工作。參考圖5 直角坐標機器人。
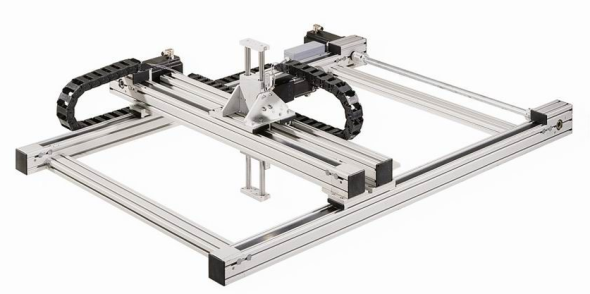
圖5 直角坐標機器人
SCARA 機器人(Selective Compliance Assembly Robot Arm)是一種圓柱坐標型的特殊工業機器人。有3個旋轉關節,其軸線相互平行,在平面內進行定位,另一個關節是移動關節,用于完成機械末端在垂直平面的運動。SCARA機器人在x,y方向上具有良好的順從性、靈活性,而在Z軸方向具有良好的剛度,此特性特別適合于裝配工作。SCARA機器人廣泛應用于塑料工業、汽車工業、電子產品工業、藥品工業和食品工業等領域。它的主要職能是搬取零件和裝配工作。 參考圖6 SCARA 機器人。
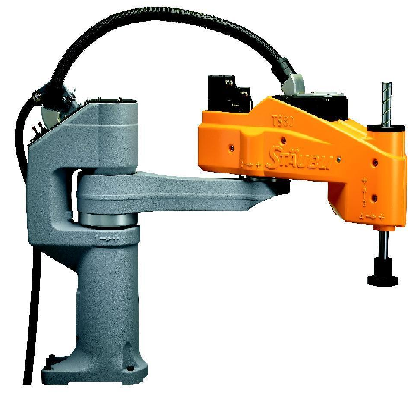
圖6 SCARA 機器人
鉸鏈型機械臂:有很高的自由度,可以多至5~6軸,適合于幾乎任何軌跡或角度的工作,可以自由編程,完成全自動化的工作, 提高生產效率;可以代替很多不適合人力完成、有害身體健康的復雜工作,比如,汽車外殼點焊。參考圖 7 鉸鏈型機械臂。

圖7鉸鏈型機械臂
Delta 3D機器人:外形酷似一只蜘蛛,這種*的幾何結構賦予了它們質量輕,強度大,輕便靈活,節省空間,高速,敏捷;適用于高速分揀。參考圖8 Delta 3D機器人。

圖8 Delta 3D機器人
DP從站
ET200 L
6ES7 131-1EH00-0XB0-電子模塊DI 16 x AC 120V
6ES7 133-1EH00-0XB0-電子模塊DI8/DO8 x AC120V
6ES7 133-1JH00-0XB0-電子模塊DI8/RO8 x AC120V
6ES7 133-1BL01-0XB0-ET 200L 16DI/16DO DC 24V/0.5A
ET200 M
6ES7 153-1AA03-0XB0-IM 153-1,分布式,PROFIBUS-DP
6ES7 153-1AA83-0XB0-IM 153-1,分布式,PROFIBUS-DP
ET200 S
6ES7 151-1CA00-0AB0 - ET 200S接口模塊IM151-1 基本型
6ES7 151-1AB02-0AB0 - ET 200S接口模塊IM151-1 FO STANDARD
6ES7 151-1BA00-0AB0 - ET 200S接口模塊IM151-1 High Feature
6ES7 151-1AA03-0AB0 - ET 200S接口模塊IM151-1 標準型
ET200 X
6ES7 147-1AA01-0XB0 - ET200X:基礎模塊BM147/CPU
6ES7 147-1AA10-0XB0 - ET 200X:基礎模塊BM147-1 CPU
6ES7 141-1BF01-0XB0 - ET200X:基礎模塊BM141,8DI
6ES7 141-1BF01-0AB0 - ET 200X:BM141 - ECOFAST RS485 8DI
DP主站
C7
6ES7 626-2DG04-0AE3 - SIMATIC C7-626/P DP,成套設備
6ES7 633-2BF02-0AE3 - SIMATIC C7-633 DP,成套設備
6ES7 634-2BF02-0AE3 - SIMATIC C7-634 DP,成套設備e
6ES7 635-2EC01-0AE3 - SIMATIC C7-635 Keys,成套設備
6ES7 635-2EB01-0AE3 - SIMATIC C7-635 Touch
6ES7 636-2EC00-0AE3 - SIMATIC C7-636 Keys,成套設備
S7-300
6ES7 313-6CE01-0AB0 - CPU313C-2 DP,32KB,16DI/16DO;DP-SS M/S
6ES7 314-6CF01-0AB0 - CPU314C-2 DP,48KB,24DI/16DO/4AI/2AO,DP-SS M/S
6ES7 315-2AF03-0AB0 - CPU 315-2 DP, 64 kB,0.3 ms/kAW
6ES7 315-2AG10-0AB0 - CPU 315-2DP, 128 kB,0.1 ms/kAW
6ES7 315-6FF01-0AB0 - CPU 315F
6ES7 316-2AG00-0AB0 - CPU 316-2DP,128kB, 0.3 ms/kAW
6ES7 317-2EJ10-0AB0 - CPU 317-2 PN/DP,512 kB,0.05 ms/kAW
6ES7 317-6FF00-0AB0 - CPU 317F-2DP,512 kB,0.1 ms/kAW
6ES7 318-2AJ00-0AB0 - CPU 318-2,512 kB,0.1ms/kAW
S7-400
6ES7 412-1XF03-0AB0 - CPU 412-1,96 kB,0.2ms/kAW
6ES7 412-2XG00-0AB0 - CPU 412-2,144 kB,0.2ms/kAW
6ES7 414-2XG03-0AB0 - CPU 414-2,256 kB,0.1ms/kAW
6ES7 414-3XJ00-0AB0 - CPU 414-3,768 kB,0.1ms/kAW
6ES7 416-2XK02-0AB0 - CPU 416-2,1.6 MB,0.08ms/kAW
6ES7 416-3XL00-0AB0 - CPU 416-3,3.2 MB,0.08ms/kAW
6ES7 416-2FK02-0AB0 - CPU 416F-2,1.6 MB,0.08ms/kAW
6ES7 417-4XL00-0AB0 - CPU 417-4,4 MB

 化工儀器網
化工儀器網