 化工儀器網
化工儀器網










詳細介紹
西門子6AG4112-2DA40-0AA0 西門子6AG4112-2DA40-0AA0
在經營活動中精益求精,具備如下業務優勢:
*銷售西門子PLC,200,300,400,1200,西門子PLC附件,西門子電機,西門子人機界面,西門子變頻器,西門子數控伺服,西門子總線電纜現貨供應,咨詢系列產品,折扣低,貨期準時,并且備有大量庫存. 長期有效
西門子數控伺服系統:802C S、802D SL、810D DE、820D SL、840C CE、840D DE、840D SL、840Di SL、S120數 控 系 統、數 控 伺 服 驅 動 模 塊、控制 模 塊、電 源模 塊、備 品 備 件 等。
本公司產品質量按西門子原廠質量標準,產品質保一年,按西門子原廠包裝標準,西門子原裝 原裝產品,按廠家執行標準,需方收到貨后七日內可提出異議!!!
我們賣的不是價格。賣的是誠信賣的是品質
這是前幾個月的事了,一天,我們的技術接到一個用戶的電話,一臺西門子MM430變頻器有故障,故障內容是變頻器的模擬量輸出沒有。下圖是西門子變頻器模擬量輸出的接線端子圖。
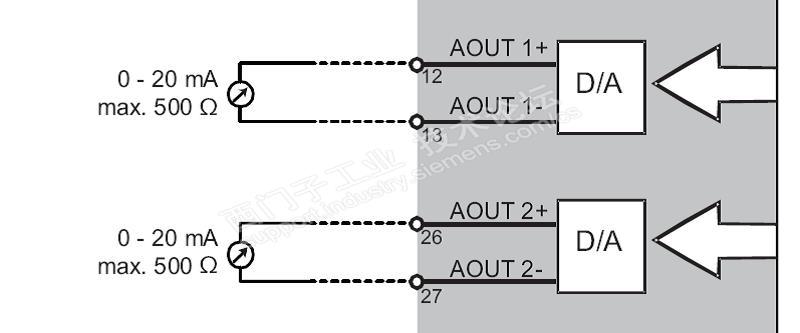
到了現場后看到西門子變頻器 12端 13端 連接的是用戶的模擬量表,斷開12端和13端的導線,單獨測量端子12和端子13之間的阻值是1歐姆左右。馬上告知客戶您的12端和13端的模擬量負載短路了。仔細檢查后發現了問題。下圖是用戶接在變頻器12端和13端的表。

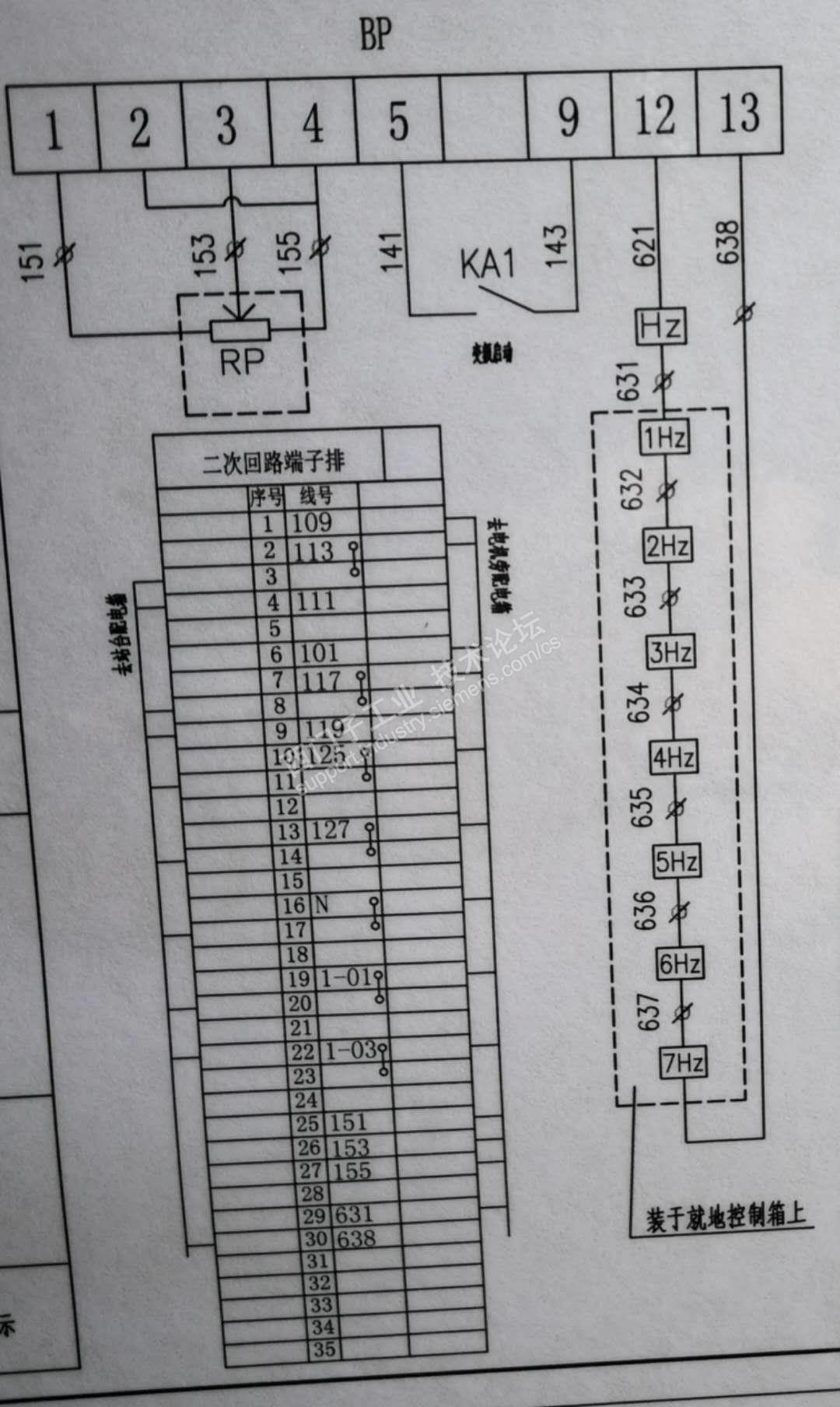
它實際是一塊滿度電流20毫安的純電流表只是把刻度改成了hz,而且是8塊這種表串接放在不同的地方,它們的總電阻加起來也就是1歐姆左右,直接接在變頻器模擬量口,肯定是短路了模擬量口,經檢測模擬量口已經壞了,變頻器一共有兩路模擬量口,另一個口,他們也這樣接過,所以也壞了。
下圖是用戶的圖紙 表HZ 是在柜門上安裝的,HZ1-----HZ7 是在室外。
變頻器維修好后,我給用戶說如果還是這個接法模擬量口還會壞,需要改進。
1 表的回路中需要串入500歐姆電阻。
2 多個電流表串聯使用是不準的,雖然可以顯示,因為是多表內阻串聯,誤差大。
后沒辦法,找不到合適的電阻,找了一個近600歐姆的電阻串入了表中,雖然不準,但不會壞變頻器了。
經常有用戶打電話說模擬量輸出口用萬用表電流檔為什么量不出電流,只能告訴用戶測量時要串入500歐姆電阻,不然會壞模擬量口的。
11月末東北已經正式進入冬季,天氣漸漸變冷,室內的溫度跟著室外溫度慢慢的降了下來。每年都有暖氣,室內不見得有多冷,今年就感覺特別的冷。雖然今年夏天辦公室增加了一臺空調,可是冬天到了,空調制熱的功能卻沒有夏天制冷的效果那么好。在有暖氣的地方待過的人都知道,要放放氣暖氣就熱了,今年無論怎么放,暖氣都是那樣。于是就想到了換熱系統是不是有問題了,進到控制室差的沒嚇死我,原來我們單位的換熱系統這么”、大氣、上檔次“。



看了一下,一個變頻器簡單的恒壓供給系統,變頻器還是一個國產的。壓力表一直沒起來,可是泵還時斷時續的轉,莫非這么一個簡單的東西還有別的地方影響?查吧,也沒有圖紙,我從來沒見過做的這么"優秀"的布線,真是給我震住了。找了一圈,使能信號一直有,泵停的時候也有。那就捋動力回路吧,捋到接觸器下邊時,發現了上圖中的下一排的東西,判斷應該是熱保吧,沒有銘牌,看著上邊有調節整定值的地方,不會是整定值不夠吧,運行了好幾年了整定值不能不夠啊,看看電機銘牌:

果然啊,整定值設置在2.5,整定值調大后問題解決。
沒見過這種熱保,還具有自動復位的功能,長見識啊!
1.1 基本概念
插補的概念源于數控機床。在數控機床中,刀具不能嚴格地按照要求加工的曲線(直線)運動,只能用折線軌跡逼近所要加工的曲線。機床數控系統依照一定方法確定刀具運動軌跡的過程,叫做插補。也可以說,已知曲線上的某些數據,按照某種算法計算已知點之間的中間點的方法,或者稱為“數據點的密化”。插補的動作過程:在每個插補周期(極短時間,一般為毫秒級)內,根據指令、進給速度計算出一個微小直線段的數據,刀具沿著微小直線段運動,經過若干個插補周期后,刀具從起點運動到終點,完成輪廓的加工。
路徑運動初來自于機器人和CNC領域,用機器人編程語言或G-Code編程。它是指在多維空間中,通過一組軸的協作動作,各軸之間無主從之分,它們按照設定的動態響應特性,實現路徑對象從起點到終點的的路徑軌跡運動。
路徑插補產生路徑的運行軌跡,計算插補周期內的路徑插補點,并通過機械運動系統轉換獲得對應插補周期內插補點的各路徑軸設定值。
隸屬于機械運動系統的單獨軸在S7 technology中被為路徑軸,路徑軸通過路徑對象執行路徑運動。參考圖1 路徑軸與路徑對象。
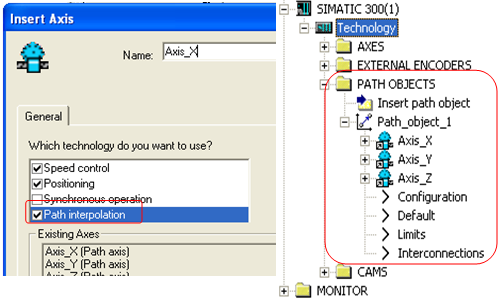
圖1 路徑軸與路徑對象
1.2 S7-Technology 路徑功能特點
S7-Technology 路徑插補功能概述:
> 從S7-Technology V4.2開始
> 允許進行3軸插補操作
> 路徑插補可以通過直線、圓弧、多項式表示實現
> Move Path命令可以組成連續運動
> 支持多種機械運動學模型
> 可以與外部位置值同步,實現傳送帶跟蹤功能
S7-Technology 路徑插補的技術特點:
> 所有的路徑軸都相互同步移動
> 所有的路徑軸都同時到達目標位置
> 路徑軌跡的移動,將會始終是以一個固定的合成速度進行 (如果動態
特性限制沒有被超越)
> 低速度性能的軸,決定了整個軌跡的高動態特性
路徑差補可以執行多3軸之間的2D或者3D的線性、圓弧或者多項式插補,路徑差補工藝對象(TO) ,適用于機械運動學控制范疇,一個共同的系統中,可以存在多個機械運動學控制結構。同步于路徑軸的“同步軸”,仍然可以實現同步控制,例如,旋轉,凸輪開關,測量功能。通過圖形化編輯器,可以簡便地設置機械運動學控制系統的參數;通過動態特性輪廓窗口,可以輕松定義路徑的動態特性;通過軌跡點表格,可以輕松定義路徑差補,計劃目的地路徑。另外還可以定義保護防撞區域和實現傳送帶位置的精確跟蹤。
1.3 機械運動系統的選擇
T-CPU 所實現運動學,等同于人們過去所熟悉機械運動學。可以將它們分為如下兩種不同的類型。參考圖2 在 T-CPU 中集成的機械運動學。
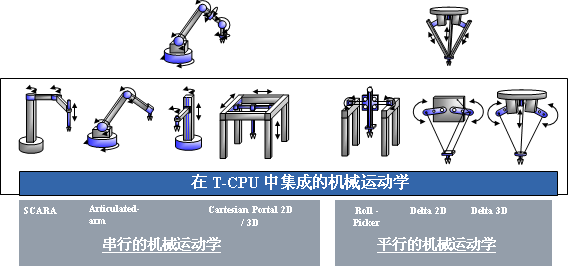
圖2 在 T-CPU 中集成的機械運動學
不同的機械運動系統可以實現TCP (Tool Center Point,工具中心點或機械運動端點)相同的路徑運動功能。盡管在某些情況下,不同的機械運動系統可實現相同的路徑運動,但是,如果機械運動系統選擇不合理,將有可能無法完成的路徑功能。所以,必須根據實際的工藝需求選擇合適的機械運動系統,并在工廠布局中考慮該機構的的合理安裝位置。參考圖3 不同機械系統的轉化。
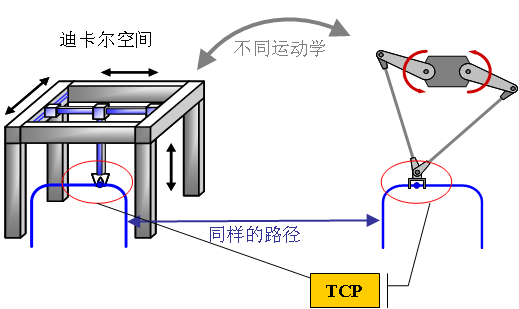
圖3 不同機械系統的轉化
2 路徑插補的實現方法
2.1 運動學模型簡介
常用的運動學模型請參考圖 4 運動學模型。
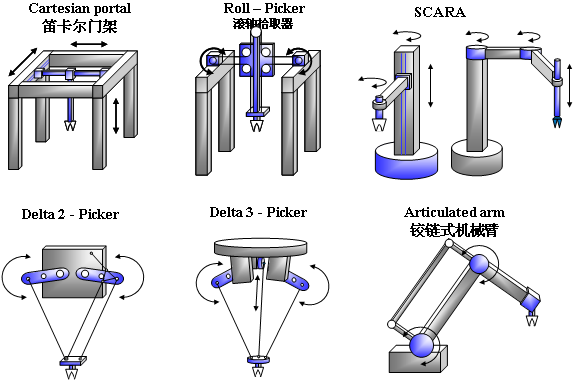
圖 4 運動學模型
下面介紹一些常用的運動學模型。直角坐標機器人 (英文名:Cartesian coordinate robot),大型的直角坐標機器人也稱桁架機器人或龍門式機器人,由多個運動自由度建成空間直角關系的、多用途的操作機器。工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動。因末端操作工具的不同,直角坐標機器人可以非常方便的用作各種自動化設備,完成如焊接、搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標、噴碼、打碼、(軟仿型)噴涂等一系列工作。參考圖5 直角坐標機器人。
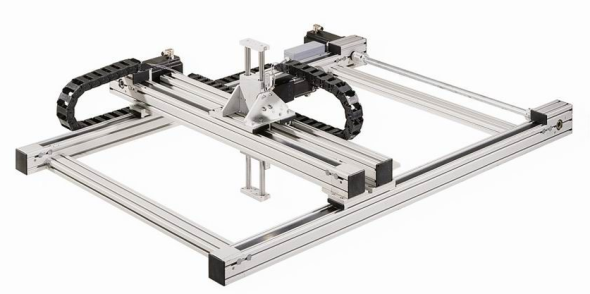
圖5 直角坐標機器人
SCARA 機器人(Selective Compliance Assembly Robot Arm)是一種圓柱坐標型的特殊工業機器人。有3個旋轉關節,其軸線相互平行,在平面內進行定位,另一個關節是移動關節,用于完成機械末端在垂直平面的運動。SCARA機器人在x,y方向上具有良好的順從性、靈活性,而在Z軸方向具有良好的剛度,此特性特別適合于裝配工作。SCARA機器人廣泛應用于塑料工業、汽車工業、電子產品工業、藥品工業和食品工業等領域。它的主要職能是搬取零件和裝配工作。 參考圖6 SCARA 機器人。
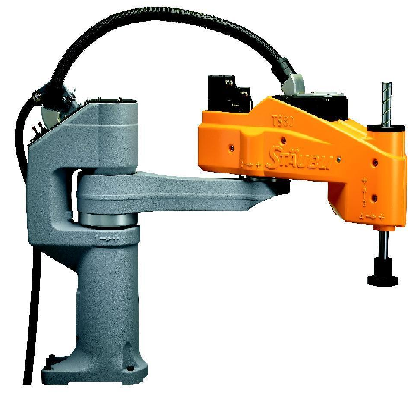
圖6 SCARA 機器人
鉸鏈型機械臂:有很高的自由度,可以多至5~6軸,適合于幾乎任何軌跡或角度的工作,可以自由編程,完成全自動化的工作, 提高生產效率;可以代替很多不適合人力完成、有害身體健康的復雜工作,比如,汽車外殼點焊。參考圖 7 鉸鏈型機械臂。

圖7鉸鏈型機械臂
Delta 3D機器人:外形酷似一只蜘蛛,這種*的幾何結構賦予了它們質量輕,強度大,輕便靈活,節省空間,高速,敏捷;適用于高速分揀。參考圖8 Delta 3D機器人。

圖8 Delta 3D機器人
CPU
6ES7211-0AA23-0B0 CPU221 DC/DC/DC,6輸入/4輸出
6ES7211-0BA23-0B0 CPU221 繼電器輸出,6輸入/4輸出
6ES7212-1AB23-0B8 CPU222 DC/DC/DC,8輸入/6輸出
6ES7212-1BB23-0B8 CPU222 繼電器輸出,8輸入/6輸出
6ES7214-1AD23-0B8 CPU224 DC/DC/DC,14輸入/10輸出
6ES7214-1BD23-0B8 CPU224 繼電器輸出,14輸入/10輸出
6ES7214-2AD23-0B8 CPU224XP DC/DC/DC,14DI/10DO,2AI/1AO
6ES7214-2BD23-0B8 CPU224XP 繼電器輸出,14DI/10DO,2AI/1AO
6ES7216-2AD23-0B8 CPU226 DC/DC/DC,24輸入/16輸出
6ES7216-2BD23-0B8 CPU226 繼電器輸出,24輸入/16輸出
擴展模塊
6ES7 221-1BH22-0A8 EM221 16入 24VDC,開關量
6ES7 221-1BF22-0A8 EM221 8入 24VDC,開關量
6ES7 221-1EF22-0A0 EM221 8入 120/230VAC,開關量
6ES7 222-1BF22-0A8 EM222 8出 24VDC,開關量
6ES7 222-1EF22-0A0 EM222 8出 120V/230VAC,0.5A 開關量
6ES7 222-1HF22-0A8 EM222 8出 繼電器
6ES7 222-1BD22-0A0 EM222 4出 24VDC 固態-MOSFET
6ES7 222-1HD22-0A0 EM222 4出 繼電器 干觸點
6ES7 223-1BF22-0A8 EM223 4入/4出 24VDC,開關量
6ES7 223-1HF22-0A8 EM223 4入 24VDC/4出 繼電器
6ES7 223-1BH22-0A8 EM223 8入/8出 24VDC,開關量
6ES7 223-1PH22-0A8 EM223 8入 24VDC/8出 繼電器
6ES7 223-1BL22-0A8 EM223 16入/16出 24VDC,開關量
6ES7 223-1PL22-0A8 EM223 16入 24VDC/16出 繼電器
6ES7 223-1BM22-0A8 EM223 32入/32出 24VDC,開關量
6ES7 223-1PM22-0A8 EM223 32入 24VDC/32出 繼電器
6ES7 231-0HC22-0A8 EM231 4入*12位精度,模擬量
6ES7 231-7PB22-0A8 EM231 2入*熱電阻,模擬量
6ES7 231-7PD22-0A8 EM231 4入*熱電偶,模擬量
6ES7 232-0HB22-0A8 EM232 2出*12位精度,模擬量
6ES7 235-0KD22-0A8 EM235 4入/1出*12位精度,模擬量
6ES7 277-0AA22-0A0 EM277 PROFIBUS-DP接口模塊
6GK7 243-2AX01-0A0 CP243-2 AS-i接口模塊
6ES7 253-1AA22-0A0 EM253 位控模塊
6ES7 241-1AA22-0A0 EM241 調制解調器模塊
6GK7 243-1EX00-0E0 CP243-1工業以太網模塊
6GK7 243-1GX00-0E0 CP243-1IT 工業以太網模塊
附件
6ES7 291-8GF23-0A0 MC291,新CPU22x存儲器盒,64K
6ES7 291-8GH23-0A0 MC291,新CPU22x存儲器盒,256KB
6ES7 297-1AA23-0A0 CC292,CPU22x時鐘/日期電池盒
6ES7 291-8BA20-0A0 BC293,CPU22x電池盒
6ES7 290-6AA20-0A0 擴展電纜,I/O擴展,0.8米,CPU22x/EM
6ES7 901-3CB30-0A0 編程/通訊電纜,PC/PPI,帶光電隔離,5-開關,5m
6ES7 901-3DB30-0A0 編程/通訊電纜,PC/PPI,帶光電隔離,USB接口,5-開關
6ES7 292-1AD20-0AA0 CPU22x/EM端子連接器塊,7個端子,可拆卸
6ES7 292-1AE20-0AA0 CPU22x/EM端子連接器塊,12個端子,可拆卸
6ES7 292-1AG20-0AA0 CPU22x/EM連接器塊,18個端子,可拆卸
6AV6 640-0AA00-0AX0 TD400C文本顯示器
6ES7272-0AA30-0YA1 TD200文本顯示器
6EP1 332-1SH31 專為S7-200 設計電源,24V/3.5A 可并聯5個
6EP1332-1LA00 PS207電源 輸入100-240VC(85-264VAC/110-300VDC),輸出:24VDC、2.5A
6EP1332-1LA10 PS207電源 輸出:24VDC、4.0A
6ES7 231-7PF22-0A0 EM231 8路輸入熱電偶
6ES7 231-0HF22-0A0 EM231模擬量輸入模塊,8輸入
6ES7 231-7PC22-0A0 EM231 4路輸入熱電阻
6ES7 232-0HD22-0A0 EM232模擬擬量輸出模塊,4輸出

 化工儀器網
化工儀器網