 化工儀器網
化工儀器網










詳細介紹
西門子紫色電纜代理商
上海盟疆工業自動化設備有限公司工業業務領域致力于為客戶提供高品質的服務,追求客戶的滿意是我們始終如一的目標。在中國,工業業務領域擁有一支技術過硬、經驗豐富的工程師隊伍,為客戶提供7x24小時全天候服務。專業的服務人員和遍布全國的服務及備件網絡將對客戶的服務需求迅速作出響應,將由設備故障引起的損失降低到小的程度。
S7-200模擬量模塊系列
模擬信號是指在一定范圍內連續的信號(如電壓、電流),這個“一定范圍”可以理解為模擬量的有效量程。在使用S7-200模擬量時,需要注意信號量程范圍,撥碼開關設置,模塊規范接線,指示燈狀態等信息。
本文中,我們按照S7-200模擬量模塊類型進行分類介紹:
1.AI 模擬量輸入模塊?
2.AO模擬量輸出模塊?
3.AI/AO模擬量輸入輸出模塊
4.常見問題分析
首先,請參見“S7-200模擬量全系列總覽表”,初步了解S7-200模擬量系列的基本信息,具體內容請參見下文詳細說明:


AI 模擬量輸入模塊
A. 普通模擬量輸入模塊:
如果,傳感器輸出的模擬量是電壓或電流信號(如±10V或0~20mA),可以選用普通的模擬量輸入模塊,通過撥碼開關設置來選擇輸入信號量程。注意:按照規范接線,盡量依據模塊上的通道順序使用(A->D),且未接信號的通道應短接。具體請參看《S7-200可編程控制器系統手冊》的附錄A-模擬量模塊介紹。
4AI EM231模塊:
首先,模擬量輸入模塊可以通過設置撥碼開關來選擇信號量程。開關的設置應用于整個模塊,一個模塊只能設置為一種測量范圍,且開關設置只有在重新上電后才能生效。也就是說,撥碼設置一經確定后,這4個通道的量程也就確定了。如下表所示:

注:表中0~5V和0~20mA(4~20mA)的撥碼開關設置是一樣的,也就是說,當撥碼開關設置為這種時,輸入通道的信號量程,可以是0~5V,也可以是0~20mA。
8AI EM231模塊:
8AI的EM231模塊,第0->5通道只能用做電壓輸入,只有第6、7兩通道可以用做電流輸入,使用撥碼開關1、2對其進行設置:當sw1=ON,通道6用做電流輸入;sw2=ON時,通道7用做電流輸入。反之,若選擇為OFF,對應通道則為電壓輸入。

注:當第6、7道選擇為電流輸入時,第0->5通道只能輸入0-5V的電壓。
B. 測溫模擬量輸入模塊(熱電偶TC;熱電阻RTD):
如果,傳感器是熱電阻或熱電偶,直接輸出信號接模擬量輸入,需要選擇特殊的測溫模塊。測溫模塊分為熱電阻模塊EM231RTD和熱電偶模塊EM231TC。注意:不同的信號應該連接至相對應的模塊,如:熱電阻信號應該使用EM231RTD,而不能使用EM231TC。且同一模塊的輸入類型應該*,如:Pt1000和Pt100不能同時應用在一個熱電阻模塊上。
熱電偶模塊TC:
EM231 TC支持J、K、E、N、S、T和R型熱電偶,不支持B型熱電偶。通過撥碼設置,模塊可以實現冷端補償,但仍然需要補償導線進行熱電偶的自由端補償。另外,該模塊具有斷線檢測功能,未用通道應當短接,或者并聯到旁邊的實際接線通道上。?
熱電阻模塊RTD:
熱電阻的阻值能夠隨著溫度的變化而變化,且阻值與溫度具有一定的數學關系,這種關系是電阻變化率α。RTD模塊的撥碼開關設置與α有關,如下圖所示,就算同是 Pt100,α值不同時撥碼開關的設置也不同。在選擇熱電阻時,請盡量弄清楚α參數,按 照對應的撥碼去設置。具體請參看《S7-200可編程控制器系統手冊》的附錄A-熱電偶和熱電阻擴展模塊介紹。

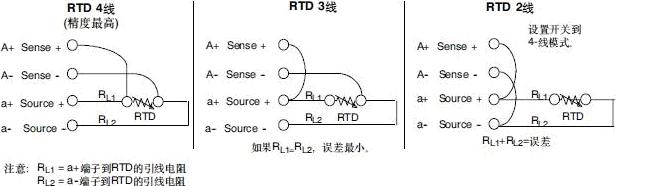
EM231 RTD模塊具有斷線檢測功能,未用通道不能懸空,接法方式如下:
(1)請將一個電阻按照與已用通道相同的接線方式連接到空的通道,注意:電阻的阻值必須和RTD的標稱值相同;
(2)將已經接好的那一路熱電阻的所有引線,一一對應連接到空的通道上。
因為熱電阻分2線制、3線制、4線制,所以RTD模塊與熱電阻的接線有3種方式,如圖所示。其中,精度高的是4線連接,精度低的是2線連接。
提示:
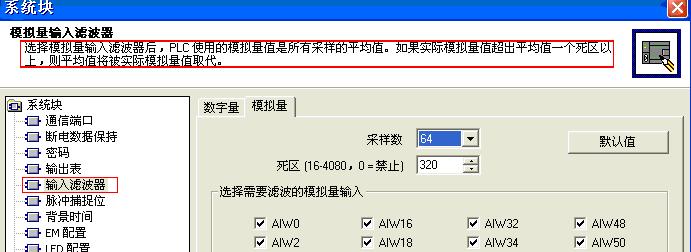
(1). 在STEP7 Micor/WIN軟件中(S7-200的編程軟件),對于模擬量輸入通道設有軟件濾波功能,如圖所示,具體請參見《S7-200 ? LOGO? SITOP 參考》->系統塊-模擬量濾波。
但是,在系統塊中設置模擬量通道濾波時,RTD和TC模塊占用的模擬量通道,應禁止濾波功能。
(2) EM231 TC和RTD模塊上,均有24V電源指示燈和SF故障指示燈。如圖所示:(a)若24V電源指示燈=OFF,則說明該模塊沒有24V工作電源;(b)若SF紅燈閃爍,原因可能是:模塊內部軟件檢測出外接斷線,或者輸入超出范圍。

注:具體請參見:《S7-200 ? LOGO? SITOP 參考》->EM231 RTD/EM231 TC。
AO模擬量輸出模塊
S7-200的擴展模塊里,分別有2路、4路的模擬量輸出模塊EM232。根據接線方式(M-V或M-I)選擇輸出信號類型,電壓:±10V,電流:0~20mA(4~20mA)。
AI/AO模擬量輸入輸出模塊
(A) CPU模塊本體集成的2路AI和1路AO
S7-200只有CPU 224XP和CPU224XPsi,本體集成有模擬量通道。其中,2路AI是:電壓信號±10V,1路AO是:電壓信號0~10V;或者電流信號0~20mA(4~20mA),輸出信號類型可以通過硬件接線來選擇。
(B) EM235模擬量輸入輸出模塊
EM235模塊有4路AI和1路AO。通過撥碼開關設置來選擇4路AI通道的輸入信號程,如下表所示,這個模塊可以測量毫伏級(mV)的信號;1路AO是:電壓信號 ±10V;或電流信號0~20mA(4~20mA),可以根據硬件接線方式(M-V或M-I)選擇輸出信號類型。
 西門子紫色電纜代理商
西門子紫色電纜代理商
注:模塊上的電位計是用來調節輸入信號和轉換數值的放大關系,在模塊出廠時已經設置好了,如無需要,請不要隨意更改。
常見問題分析
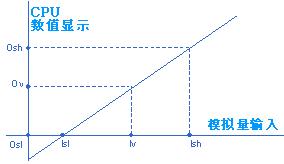
A.模擬量輸入與數字量的對應關系:
模擬量信號(0~10V,0~5V或0~20mA)在S7-200 CPU內部用0~32000的數值表示(注:4~20mA對應6400~32000),這兩者之間有一定的數學關系,如圖所示:
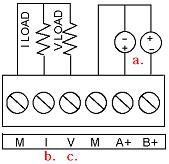
B.模擬量模塊的硬件接線介紹
(1)CPU 224 XP集成有2路電壓輸入,接線方法見a:分別為A+和M、B+和M,此時只能輸入±10V 電壓信號。
CPU 224XP還集成有1路模擬量輸出信號。電流輸出如圖b,將負載接在I和M端子之間;電壓輸出如圖c,將負載接在V和M端子之間。
(2)模擬量輸入的接線方式
以4AI EM231模塊為例,分別介紹電壓、電流型輸入信號的接線方式,如圖所示。注意:此接線圖是一個示意圖,表述的是不同的接線方式,并不是指該模塊只有A通道可以接入電壓,B通道必須懸空,C和D通道只能接入電流。
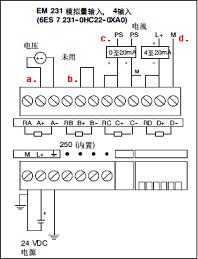
當您的信號為電壓輸入時可以參考接線方法a,以此類推。
方式a. 電壓輸入方式:信號正接A+;信號負接A-;
方式b. 未用通道接法(不要懸空):未用通道需短接,如B+和B-短接;
方式c. 電流輸入方式(四線制):信號正接C+,同時C+與RC短接;信號負接C-,同時C-和模塊的M端短接。
方式d. 電流輸入方式(兩線制):信號線接D+,同時D+與RD短接;電源M端接D-,同時和模塊的M端短接。
注:具體請參見:《S7-200 ? LOGO? SITOP 參考》->模擬量模塊接線。
(3)電流型信號輸入接線方式
電流型信號的接線方式,分為四線制、三線制、二線制接法。這里討論的“幾線制”,是以傳感器或儀表變送器是否需要外供電源來區別的,而并不是指EM231模塊需要幾根信號線,或該變送器的信號線輸出。
a. 四線制-電流型信號的接法:
四線制信號是指信號設備本身外接供電電源,同時有信號+、信號-兩根信號線輸出。供電電源可有220VAC或24VDC,接線如圖所示:
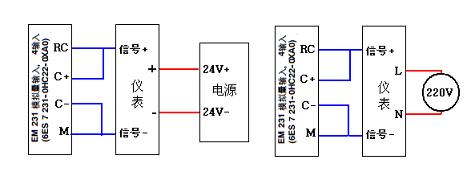
b. 三線制-電流型信號的接法:
三線制信號是指信號設備本身外接供電電源,只有一根信號線輸出,該信號線與電源線共用公共端,通常情況是共負端的。接線如圖所示:
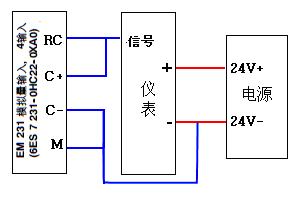
注:若設備的24VDC供電電源與EM231模塊的供電電源不是同一個電源,那么,需要將模塊的M端與該通道的負端引腳短接(如,M和C-短接)。這是為了使模塊與測量通道工作在同一的參考電壓,也就是等電位。下面的二線制接法同理。
抱閘控制功能
G120變頻器具有一個內部邏輯專門用于控制電機抱閘,電機抱閘可以防止電機靜止時意外旋轉,特別是位能性負載。下表中列出抱閘控制參數:



1.1 概述
無論在帶編碼器矢量控制(VC)和無編碼器矢量控制(SLVC)下,動態優化都是保證控制精度和高動態響應的前提。只有在矢量控制模式(P1300≥20)下,才需要對電機進行動態優化。動態優化包括兩種模式:旋轉測量(包含飽和曲線測量、轉動慣量測量和速度控制器優化)和速度控制器優化(包含轉動慣量測量和速度控制器優化)。
動態識別必須在以下條件下才能完成:
1. 接線正確,并且變頻器和電機沒有絕緣故障;
2. 電機的銘牌參數準確的輸入到變頻器中;
3. 電機在空載狀態下;
4. 電機可以自由旋轉;
5. 靜態識別已經完成。
1.2 相關參數
當執行過旋轉測量以后,不必再執行速度控制器優化。速度控制器優化已經包含在旋轉測量中。如果選擇P1300≥20,并且沒有完成靜態識別,變頻器會報出A07994,提示電機靜態識別未完成。
表 STYLEREF 1 s 1? SEQ 表 * ARABIC s 1 1動態優化的參數設置
參數號 | 出廠值 | 描述 |
P1900 | 0 | 電機數據檢測及旋轉檢測 |
P1910 | 0 | 電機數據檢測 |
P1960 | 0 | 1(旋轉測量,無編碼器矢量控制下) |
3(速度控制器優化,無編碼器矢量控制下) | ||
2(旋轉測量,帶編碼器矢量控制下) | ||
4(速度控制器優化,帶編碼器矢量控制下) | ||
P1961 | 40% | 檢測飽和曲線時的轉速 |
P1965 | 40% | 檢測轉動慣量時的轉速 |
P1967 | 100% | 速度控制器優化的動態系數 |
注意:在動態優化過程中,電機會頻繁的加速和減速,可以通過設置P1961和P1965限制優化過程中電機的高轉速;
G120(cu2x0x-2x)變頻器執行動態優化過程中,表1-2中的這些參數會被自動測量和設置,以幫助變頻器提高控制精度和動態響應。其中,轉速控制器適配的說明和使用請參看《G120(CU2x0x-2)轉速控制器適配》文檔。
表 STYLEREF 1 s 1? SEQ 表 * ARABIC s 1 2動態優化測量的參數
參數號 | 描述 | 參數號 | 描述 |
r331 | 實際的電機勵磁電流 | P1464 | 轉速控制器適配轉速下限 |
P341 | 電機轉動慣量 | P1465 | 轉速控制器適配轉速上限 |
P342 | 總轉動慣量與電機轉動慣量比 | P1470 | 無編碼器運行時轉速控制器的P增益 |
P360 | 電機勵磁電感 | P1472 | 無編碼器運行時轉速控制器的積分時間 |
P1460 | 轉速控制器P增益適配轉速下限 | P1496 | 加速度前饋定標 |
P1461 | 轉速控制器P增益適配轉速上限比例系數 | r1968 | 轉速控制器優化的動態系數 |
P1462 | 轉速控制器積分時間適配轉速下限 | r1973 | 檢測出編碼器的脈沖數 |
P1463 | 轉速控制器積分時間適配轉速上限比例系數 |
|
|
1.3 動態優化操作步驟
無編碼器矢量控制動態優化操作步驟
當完成變頻器的快速調試以后,進行如下設置:
1、設置P1900=1,P1910=1,P1960=1;
2、此時屏幕上出現報警代碼A07991和A07980,提示靜態識別和動態優化已經激活;
3、啟動變頻器,靜態識別開始,電機發出蜂鳴聲;
4、靜態識別結束后,報警代碼A07991消失,蜂鳴聲消失,變頻器自動停機;
5、再一次啟動變頻器,動態優化開始,電機開始旋轉;
6、動態優化結束后,報警代碼A07980消失,變頻器自動停機;
7、將P0971=1,執行Copy RAM to ROM.
帶編碼器矢量控制動態優化操作步驟
當完成變頻器的快速調試以后,進行如下設置:
1、設置P1900=1,P1910=1,P1960=2;
2、此時屏幕上出現報警代碼A07991和A07980,提示靜態識別和動態優化已經激活;
3、啟動變頻器,靜態識別開始,電機發出蜂鳴聲;
4、靜態識別結束后,報警代碼A07991消失,蜂鳴聲消失,變頻器自動停機;
5、再一次啟動變頻器,動態優化開始,電機開始旋轉;
6、動態優化結束后,報警代碼A07980消失,變頻器自動停機;
7、將P0971=1,執行Copy RAM to ROM.

 化工儀器網
化工儀器網