 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

產(chǎn)品分類品牌分類
-
IFM變送器 IFM斷路器 IFM解調(diào)器 IFM攝像機(jī) IFM控制器 IFM電纜 IFM壓力變送器 IFM超聲波流量傳感器 IFM壓縮空氣流量計(jì) IFM振動(dòng)變送器 IFM加速計(jì) IFM振動(dòng)傳感器 IFM標(biāo)簽 IFM閱讀器 IFM讀寫頭 IFM主機(jī) IFM網(wǎng)關(guān) IFM旋入式傳感器 IFM液位傳感器 IFM控制面板 IFM流量計(jì) IFM流量變送器 IFM超聲波流量計(jì) IFM渦街流量計(jì) IFM電磁流量計(jì) IFM壓力計(jì) IFM壓力傳感器 IFM控制閥 IFM安全光柵 IFM安全光幕 IFM3D攝像機(jī) IFM傳感器 IFM3D傳感器 IFM開關(guān) IFM模塊 IFM分配器 IFM延伸器 IFM轉(zhuǎn)換器 IFM繼電器 IFM顯示器 IFM速度監(jiān)控器 IFM編碼器 IFM放大器 IFM觸摸式傳感器 IFM對(duì)比傳感器 IFM彩色傳感器 IFM光纖放大器 IFM激光傳感器 IFM光電式傳感器 IFM溫度傳感器 IFM氣缸傳感器 IFM速度傳感器 IFM磁性傳感器 IFM電容式傳感器 IFM電感式傳感器 IFM位置傳感器 IFM傾角傳感器
-
賀德克HYDAC液壓閥 賀德克HYDAC蓄能器 賀德克HYDAC流量變送器 賀德克HYDAC壓力表開關(guān) 賀德克HYDAC過濾裝置 賀德克HYDAC熱交換器 賀德克HYDAC距離傳感器 賀德克HYDAC壓力閥 賀德克HYDAC冷卻器 賀德克HYDAC電磁閥 賀德克HYDAC繼電器 賀德克HYDAC換向閥 賀德克HYDAC壓力傳感器 賀德克HYDAC同軸閥 賀德克HYDAC截止閥 賀德克HYDAC球閥 賀德克HYDAC油況傳感器 賀德克HYDAC污染傳感器 賀德克HYDAC轉(zhuǎn)速傳感器 賀德克HYDAC位置傳感器 賀德克HYDAC位置開關(guān) 賀德克HYDAC液位傳感器 賀德克HYDAC液位開關(guān) 賀德克HYDAC流量開關(guān) 賀德克HYDAC流量傳感器 賀德克HYDAC溫度開關(guān) 賀德克HYDAC溫度傳感器 賀德克HYDAC壓力開關(guān) 賀德克HYDAC測量儀 賀德克HYDAC壓力變送器 賀德克HYDAC葉片泵 賀德克HYDAC濾筒 賀德克HYDAC比例閥 賀德克HYDAC止回閥 賀德克HYDAC節(jié)流閥 賀德克HYDAC限壓閥 賀德克HYDAC方向閥 賀德克HYDAC阻尼器 賀德克HYDAC活塞式蓄能器 賀德克HYDAC監(jiān)控系統(tǒng) 賀德克HYDAC過濾器 賀德克HYDAC濾清器 賀德克HYDAC濾芯
派克液壓馬達(dá)的爬行現(xiàn)象是怎么一回事?
派克液壓馬達(dá)的轉(zhuǎn)速計(jì)算公式已如前述。理論上講,其轉(zhuǎn)速應(yīng)是均勻的,但是,當(dāng)派克液壓馬達(dá)工作轉(zhuǎn)速過低時(shí)往往保護(hù)不了其均勻性,產(chǎn)生一種時(shí)快時(shí)慢、時(shí)動(dòng)時(shí)停的不穩(wěn)定狀態(tài),這就是被人們稱作液壓馬達(dá)的爬行現(xiàn)象。

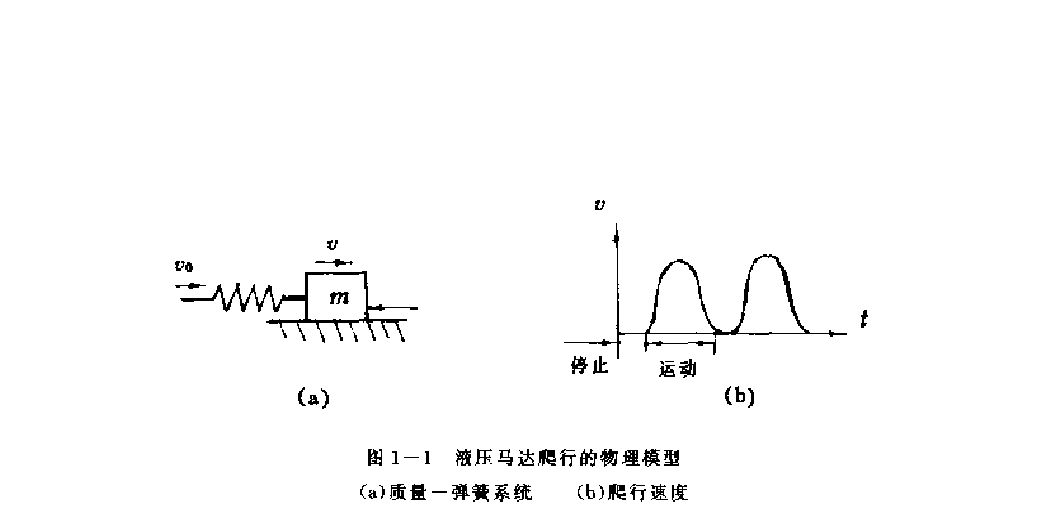
產(chǎn)生爬行現(xiàn)象的原因和圖1-1所示的低速摩擦阻力特性有關(guān)。通過的阻力是隨速度增大而增加的,而在靜止和低速區(qū)域工作的馬達(dá)內(nèi)部的摩擦阻力,當(dāng)工作速度增大時(shí)非但不增加,反而減少,形成了所謂“負(fù)特性”的阻力。另一方面,派克液壓馬達(dá)和負(fù)載由液壓油被壓縮后壓力升高而被推動(dòng)的,因此可以用圖1-1(a)的物理模型表示低速區(qū)域液壓馬達(dá)的工作過程:以勻速V0推著撐壓彈簧一端(其彈簧壓縮能相當(dāng)于高壓下可壓縮的工作介質(zhì)的液壓能)的質(zhì)量為M的物體(相當(dāng)于馬達(dá)內(nèi)部摩擦阻力和負(fù)載質(zhì)量、轉(zhuǎn)動(dòng)慣量)克服“負(fù)特性”的摩擦阻力運(yùn)動(dòng)。當(dāng)質(zhì)量M靜止或速度很低時(shí)阻力大,彈簧不斷壓縮,蓄積能量,增加推力。
只有等到彈簧壓縮到其推力等于靜摩擦力時(shí)才開始運(yùn)動(dòng),即u>0。但是一旦物體開始運(yùn)動(dòng),阻力突然減小,壓縮能立刻釋放,物體突然加速滑動(dòng),其結(jié)果又使彈簧的壓縮量減少,推力減少,物體依靠慣性前移一段路程后就停止下來,直到彈簧的移動(dòng)又使彈簧壓縮、推力增加、物體再一次躍動(dòng)為止,形成圖1-1(b)所示的時(shí)動(dòng)時(shí)停狀態(tài)。對(duì)派克液壓馬達(dá)來說,這就是爬行現(xiàn)象。
另外,派克液壓馬達(dá)排量本身及泄漏量也在隨轉(zhuǎn)子轉(zhuǎn)動(dòng)的相位角變化作周期性波動(dòng),這也會(huì)造成馬達(dá)轉(zhuǎn)速的波動(dòng)。當(dāng)液壓馬達(dá)在低速運(yùn)轉(zhuǎn)時(shí),這種轉(zhuǎn)速的波動(dòng)難以被轉(zhuǎn)動(dòng)慣性所掩蓋而清楚地表現(xiàn)出來,形成爬行現(xiàn)象。
如果對(duì)文章中出現(xiàn)的產(chǎn)品感興趣,請點(diǎn)擊:派克液壓馬達(dá)