 化工儀器網
化工儀器網










詳細介紹
西門子S7-1200代理
上海盟疆有限公司工業業務領域致力于為客戶提供高品質的服務,追求客戶的滿意是我們始終如
一的目標。在中國,工業業務領域擁有一支技術過硬、經驗豐富的工程師隊伍,為客戶提供7x24小時全天
候服務。專業的服務人員和遍布全國的服務及備件網絡將對客戶的服務需求迅速作出響應,將由設備故障
引起的損失降低到小的程度。
我公司經營西門子*現貨PLC;S7-200S7-300 S7-400 S7-1200 觸摸屏,變頻器,6FC,6SNS120 V10 V60 V80伺服數控備件:*電機(1LA7、1LG4、1LA9、1LE1),國產電機(1LG0,1LE0)大型電機(1LA8,1LA4,1PQ8)伺服電機(1PH,1PM,1FT,1FK,1FS)西門子保內*產品‘質保一年。一年內因產品質量問題免費更換新產品;不收取任何費。咨詢。
追求,追求精確
要通過“嚴格”的檢驗程序,以可編程控制器(PLC)產品為例,在整個生產過程中針對該類產品的質量檢測節點就超過20個。視覺檢測是數字化工廠*的質量檢測方法,相機會拍下產品的圖像與Teamcenter數據平臺中的正確圖像作比對,一點小小的瑕疵都逃不過SIMATIC IT品質管理模塊的“眼睛”。對比傳統制造企業的人工抽檢,這顯然要可靠又快速得多。”
數據通訊概述
---- S7-300 具有多樣的通訊方式。
- 用全局數據通訊進行聯網的CPU之間數據包周期的交換
- 用通訊功能塊對網絡其他站點進行由事件驅動的通訊。
- 對于聯網,可以使用MPI, PROFIBUS或工業以太網。
- 全局數據,通過全局數據通訊服務,聯網的CPU可以相互之間周期性地交換數據。(到4gd包,每包有22字節/周期)。例如:一個CPU可以訪問另一個CPU的數據、存儲位和過程映象。全局數據通訊只可以通過MPI進行。在step7中的GD表中進行組態。
-通訊功能,對S7/M7/C7的通訊服務可以使用系統內部塊建立起來。 - 通過MPI的標準通訊
- 擴展通訊通過MPI、K總線、PROFIBUS和工業以太網(S7-300只能作為服務器)
對于s5系列及第三方的通訊服務,可以使用非駐留塊建立。 - 通過PROFIBUS和工業以太網實現S5兼容的通訊
- 通過PROFIBUS和工業以太網實現標準通訊 (第三方設備)
---- 與全局數據進行對比,必須為通訊功能建立通訊連接。
通過CP的數據通訊(點對點)
---- 用CP 340/CP 341通訊處理模塊可以建立起經濟而方便的點到點鏈。在3種通訊接口的基礎上,有多種通訊協議可以使用。
- 20 mA(TTY)
- RS 232C/V.24
- RS 422/RS 485
可連接下列設備: - S7 PLC和S5 PLC及第三方系統
- 打印機
- 機器人控制
- 掃描儀、條碼閱讀器等
通過多點接口(MPI) 的數據通訊
---- 多點接口(MPI)通訊口集成在 S7-300 CPU上。它可以用于簡單聯網。
- MPI能同時連接幾個帶 STEP 7的編程器/PC、人機界面(HMI)
- 全局數據
聯網的CPU可以利用全局數據(GD)服務,周期性地相互進行數據交換。 (每個程序周期多允許16個GD包,每包多64字節)。S7-300 cpu每次多可以交換4個含22個字節的數據包,而且多可以有16個CPU參與數據交換(用step7 v4.x以上版編程軟件)。全局數據通訊只能通過MPI接口。 - 內部通訊總線(K-總線)
CPU的MPI是直接與S7-300的K總線連接。即可以用k總線接口從編程器直接通過MPI對FM/CP模塊進行編址。 - 功能強大的通訊技術
- 多32個MPI站
- 每個CPU多有8個動態通
- 訊連接用于與SIMATIC S7/M7 300/ 400、C7進行標準通訊
- 每個CPU多有4個靜態通訊連接用于與編程器、PC機、SIMATIC HMI系統和 SIMATIC S7/M7-300/ 400、C7進行擴展通訊 。
- 數據傳輸速度187.5千位/秒或12兆位/秒 - 靈活的擴展能力
用下列可靠的部件來配置MPI通訊:LAN電纜,LAN連接器和 RS 485中繼器均采用PROFIBUS和"分布式 I/O"系列產品。這些部件保證了的配置。例如,在任意兩個給定的MPI節點之間可串聯多10個中繼器來跨越長距離。
通過CP進行數據通訊(PROFIBUS或工業以太網)
---- 可通過CP 342/343通訊處理器將SIMATIC S7-300與 PROFIBUS 和工業以太網總線系統相連。
---- 可連接的包括
|
|
模板的診斷及過程監視
---- S7-300有多種輸入/輸出模板具有智能功能:
- 對信號進行監視 (診斷)
- 對過程信號進行監視 (過程中斷)
在電網-變頻器-電機-負載構成的驅動系統中,能量的傳遞是雙向的。電動機工作模式時,電能從電網經由變頻器傳遞到電機,轉換為機械能帶動負載,負載因此具有動能或勢能;當負載釋放這些能量以求改變運動狀態時,電機被負載所帶動,進入發電機工作模式,向前級反饋已轉換為電形式的能量,這些能量被稱為再生制動能量,可以通過變頻器返回電網,或者消耗在變頻器系統的制動電阻中。如圖1-1所示。
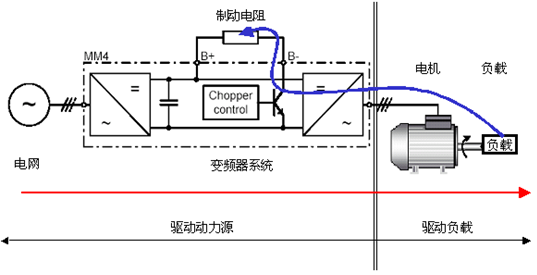
圖1-1 驅動系統的能量流向
較大制動能量的產生經常出現在下面幾種場合里:
? 起重設備的重物下放過程
? 大慣量負載設備的快速減速過程
? 游梁式抽油機的驢頭下放過程等等。
西門子變頻器MM440由三部分構成,整流部分,直流回路部分,逆變部分。當MM440作為驅動轉換源而處在上述的制動過程時,制動能量將通過其逆變部分返回到直流回路,由于整流部分由不可控的二極管組成,制動能量無法回到電網,造成直流回路電壓泵升,進而導致MM440因直流回路電壓過高(F0002)而停機。為避免上述情形的發生,MM440 提供了動態制動功能,即在直流回路上安裝一個制動單元,再配以適當的制動電阻,將制動能量在該電阻上以熱能的形式消散。A-F尺寸的MM440已將制動單元集成在變頻器內部,只需選配制動電阻,安裝在MM440端子B+ B- 上,然后調整相應的參數即可,而功率相對較大的FX、GX尺寸MM440內部沒有集成制動單元,需要從SIMOVERT MASTERDRIVES的產品目錄里選配相應的制動單元以及制動電阻。
本章將介紹制動能量的簡單計算以及MM440制動單元的基本工作原理,幫助您實現西門子MM440變頻器制動電阻的正確選型。
二 制動能量的簡單計算
? 制動能量的產生
根據電機理論, 定子中通入同步頻率 ?1的交流電流, 在氣隙中產生順時針旋轉磁場作用在轉子上,相當于轉子繞組逆時針運動切割旋轉磁場,轉子回路因而感應出電流產生旋轉力矩M,方向如圖2-1中a所示。經過負載的平衡,轉子以 (1-s) ?1的速度穩定旋轉,轉子繞組仍然逆時針以s?1的速度切割旋轉磁場。電機工作在電動機模式下, P = M?Ω>0, 即運行在*象限。
在需要變頻器快速制動負載的情況下,變頻器通入電機定子中的電流頻率突降為?1′ (?1′ <?1), 由于驅動負載存在慣性,轉子的轉速不能突降,而是仍然維持在原轉速上,導致轉子繞組切割旋轉磁場的方向改變,轉子電流方向以及電磁力矩方向也因此發生改變,如圖2-1中b所示,電機工作在發電機模式下, 開始運行在第二象限,P=(-M)?Ω<0, 再生制動能量產生。 如果電機被負載拖動,轉子轉速超過變頻器輸入的同步轉速,同樣會有上述的現象發生。

a) 正向運行時 b) 轉子轉速大于同步轉速時
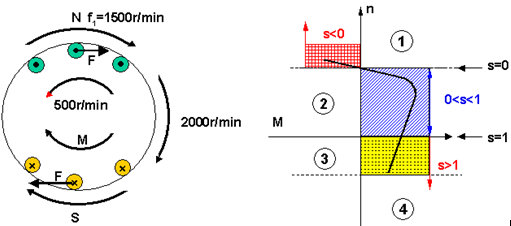
c) 轉子旋轉方向改變時 d) 電機四象限圖
圖2-1 制動能量產生時的電機狀態
在驅動系統下放重物的過程中,轉子繞組仍然保持逆時針運動切割旋轉磁場,轉子電流以及旋轉力矩方向不變,但是由于切割速度過快,轉子電流產生的祛磁磁場將能量返回了定子側,電機工作在發電機模式下, 開始運行在第四象限,如圖2-1中 c 所示,P=M?(-Ω)<0, 再生制動能量產生。
? 制動能量的簡單計算
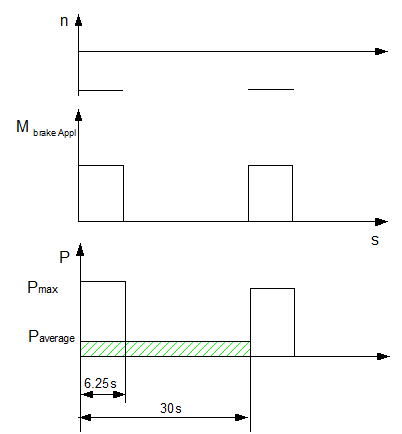
例1 某客戶將MM440 應用在升降驅動設備上,并要求在6.25秒內以0.4m/s的速度下 放500kg的重物,每30s重復一次該過程,應當如何計算制動功率?
 西門子S7-1200代理
西門子S7-1200代理
重物的勢能為: A= m x g x h =500kg x 9.81 x (0.4m/s x 6.25s)=12263J
大 功率為: P brake Appl max = A/s = 12263J/6.25s = 1962W
平均 功率為: P brake Appl average = 1962W x 6.25s / 30s= 392.4W
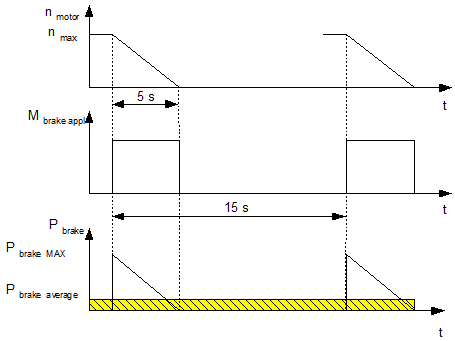
例2 某驅動負載需要從2900RPM的速度降至為0,其驅動數據見表1,如何計算反饋回變頻器直流側的制動能量?
電動機額定功率 Pmotor N=5.5 KW
電動機效率 ?motor =0.865
電動機額定轉速 N motor N= 2925 RPM
電動機轉動慣量 J motor =0.015kgm2
負載轉動慣量 J load =0.4 kgm2
電動機高運行轉速 nmax =2900RPM
制動時間 t brake appl =5s
負載工作周期 t cycle appl =15s
產生的制動轉矩:
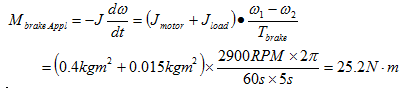
一個周期內產生的大制動功率:

一個周期內的總制動能量:


一個周期內的平均制動功率:

三 MM440 制動單元的基本工作原理
? 制動單元激活電壓與直流回路故障電壓
按照上述的計算方法得出的再生制動能量將反饋到變頻器的內部,造成直流回路上電壓泵升。為了避免變頻器因直流回路過電壓F0002而跳閘,當電壓上升到臨界點 UDC chopper 時,制動單元就被激活,并按照預先規定的負載工作周期將制動能量消耗在外接制動電阻上,拉動直流回路電壓下降。如果制動能量過大,未能在規定時間內得到散逸,那么直流回路電壓將繼續上升,直到F0002跳閘。如圖3-1所示。
圖3-1直流回路電壓的上升過程
| 制動單元觸發臨界電壓 UDC chopper有兩種算法,采用哪一種,則取決于MM440 參數P1254 | 若P1254=0 | 1.13 x  x P0210 x P0210 |
| 若P1254=1 | 0.98 x r1242 |
表3-1 激活動態制動功能的直流回路電壓值
? 制動單元動作過程
MM440變頻器制動單元的核心是一個門限電壓控制斬波器(IGBT transistor),當它導通時再生制動能量被外接制動電阻吸收,轉化成熱能得以釋放。斬波器的工作頻率 f chopper為2KHz,占控比 t chopper on 由變頻器內部的監控系統決定。如圖3-2所示。
圖3-2 動態制動的操作方式
當再生制動能量迫使直流回路電壓達到UDC chopper時,制動單元自動投入運行,由監控系統為斬波器選擇適當的占控比,制動能量被制動電阻吸收。
? 如果制動能量少于在制動電阻上消耗的能量( P brake resistor=VDC2 / Rmin) ,那么直流回路電壓會很快下降到UDC chopper之下,制動單元會在開通2ms之后自動關閉,占控比的選擇在通路1上完成。 若直流回路電壓再次達到UDC chopper,該過程將被重復。
? 如果制動能量多于此時在制動電阻上消耗的能量,那么盡管制動自動已經投入運行,直流回路電壓仍然會繼續上升,由監控系統選擇的占控比也快速線性增加,直到占控比為1(通道1),斬波器持續開通,制動電阻在此其間持續吸收制動能量。為了保護此時的制動電阻不會因吸收了過多能量而過熱損壞,必須事先根據制動電阻的制動能力選擇適當的持續工作時限 t chopper on。當持續工作時限達到時,切換到通道2,占控比自動被修正為P1237中設定的值以減少制動能量進入制動電阻,令其有充分的時間冷卻,此時直流回路電壓將有所回升。其過程如圖3-3所示。可見,如果電阻值選擇的太小,或者P1237 的值選擇不當,會造成制動能量因吸收不凈而導致的直流回路電壓繼續上升,而制動電阻會因過熱而損壞。
MM440制動單元的斬波器為通道2規定了5種占控比,即負載工作周期,由參數P1237 來選擇 。列表3-2如下。
| P1237 | t chopper on (斬波器占控比為1的長時間) | P brake resistor average | |
| 0 | 0% | 動態制動未激活 | 0 |
| 1 | 5% | 12.0s | 0.05 P brake Appl max |
| 2 | 10% | 12.6s | 0.1 P brake Appl max |
| 3 | 20% | 14.2s | 0.2 P brake Appl max |
| 4 | 50% | 22.8s | 0.5 P brake Appl max |
| 5 | 100% | 在制動單元激活狀態下始終開通 | 1 P brake Appl max |
表3-2 MM440的負載工作周期
四 制動電阻的計算以及選型
? 西門子制動電阻的說明
西門子MICROMASTER 變頻器產品樣本DA51.2 中列出的制動電阻只是按照P1237=1即5%的工作負載周期來進行設計的。例如: 訂貨號為6SE6400-4BC05-0AA0的制動電阻,小阻值為180?,可以承受大直流回路電壓為420V ,因此該制動電阻可在12秒內連續開通,吸收 Pbrake resistor max = U dc max 2 /R min =980W的大制動功率。12秒后,僅能承擔5%的大制動功率,即約50W 的連續導通功率,直到240秒后制動電阻得到充分的冷卻,方可再次承擔12秒的大制動功率。
? 制動電阻的選擇與校驗
為MM440變頻器配置制動電阻,需要滿足二個條件:
1) 制動電阻大功率 P brake resistor max >= 大制動功率P brake Appl max
2) 負載工作周期內的制動電阻連續功率 P brake resistor average >=
制動周期內的平均制動功率 P brake Appl average
下面舉例說明如何選擇制動電阻, 請回顧第二節中的例2,為5.5KW 、3~380-480V的MM440配置制動電阻,按照樣本DA51.2初選6SE6400-4BD16-5CA0
一個制動周期內產生的大制動功率: P brake Appl max = 6.6kW
制動電阻可以承受的大制動功率: P brake resistor max =12.6 kW
P brake Appl max < P brake resistor max *個條件滿足
一個制動周期內的平均制動功率: P brake Appl average =1.1kW
負載工作周期內的制動電阻連續功率: P brake resistor average = 0.65 kW
P brake Appl average > P brake resistor average第二個條件不滿足
表明該制動電阻沒有足夠的容量接受1.1kW的制動能量。在此,可以提出兩個解決方案:
1)采用四個該型號電阻,兩并兩串地接入,見圖3-4。總的制動阻值并未改變,因而能夠承受的大制動功率 P brake max = U dc max 2 /R min 也未改變。 但是負載工作周期內的制動電阻連續功率卻提高了4倍,
P brake resistor average = 0.65kW × 4 = 2.6kW。此時P1237 必須放開限制,設置為3,即負載工作周期為20%。
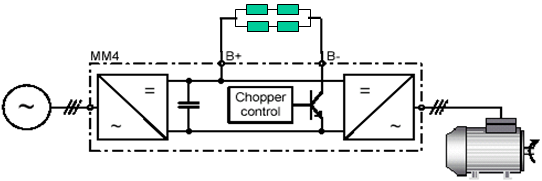
圖3-4 制動電阻的接入方法
3) 選擇其他型號大容量的制動電阻,例如采用MASTERDRIVES 產品系列中訂貨號為6SE7018-0ES87-2DC0的制動電阻,其阻值為80?, 因此能夠承受的大制動功率P brake max =U dc max 2 /R min =8.82kW,
P brake Appl max < P brake resistor max *個條件滿足
因為MASTERDRIVES 產品系列的制動電阻均是按照20%的負載工作周期制定的,因此需要將P1237設置3,P brake resistor average =8.82kW×0.2=1.764kW
P brake Appl average < P brake resistor average第二個條件滿足
? FX-GX 制動單元與制動電阻選擇
在MICROMASTER DRIVES系列中,僅在外形尺寸為A-F的MM440里集成了制動單元,只需再選擇一個適當的外接制動電阻即可。外形尺寸為FX 、GX的MM440因為功率相對較大,不再在內部集成制動單元,而是需要采用MASTERDRIVES系列中的外接制動單元以及制動電阻。其選擇方法參見MASTERDRIVES產品樣本。
? MM440 中相關動態制動的必要參數設置
P1233=0 禁止直流制動
P1234=0 禁止復合制動
P1240=0 禁止直流電壓控制器功能
P1254=0或1 選擇 UDC chopper的計算方法
P1237>0 使能動態制動功能
 化工儀器網
化工儀器網