您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)

1FL6024-2AF21-1MA1西門(mén)子V90伺服電機(jī)0.1KW
 | 1FL6024-2AF21-1MA1 SIMOTICS S-1FL6 電源 230 V 三相交流 PN=0.1 kW;NN=3000 U M0=0.32 Nm;MN=0.32 Nm 軸 高度 20 mm 值編碼器 單匝 21 位帶滑鍵 公差 N 無(wú)駐車(chē) 制動(dòng)器,防護(hù)等級(jí) IP65 帶適合驅(qū)動(dòng)的油密封件 SINAMICS V90 |
1. 定位和相對(duì)定位區(qū)別?
答:相對(duì)定位是指在軸當(dāng)前位置的基礎(chǔ)上正方向或負(fù)方向移動(dòng)一段距離;定位指的是當(dāng)軸建立了坐標(biāo)系后,軸的每個(gè)位置都有固定的坐標(biāo),無(wú)論軸的當(dāng)前位置值是多少,當(dāng)軸指令了運(yùn)行指令后相同的坐標(biāo)值,軸終都定位到同一個(gè)位置。
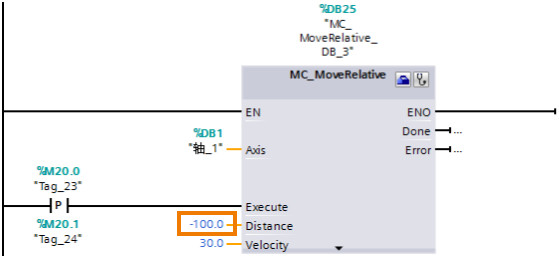
2. 如何設(shè)置MC_MoveRelative方向運(yùn)行?
答: 將MC_MoveRelative指令中的“Distance”設(shè)置成負(fù)值就可以讓軸向負(fù)方向運(yùn)行了。如下圖所示。
3. 為什么有時(shí)用戶(hù)在監(jiān)控程序的時(shí)候看不到指令的完成位Done的為1?
答:帶有Execute管腳的指令,例如MC_MoveRelative等指令的Done和Execute之間有下圖中描述的關(guān)系:
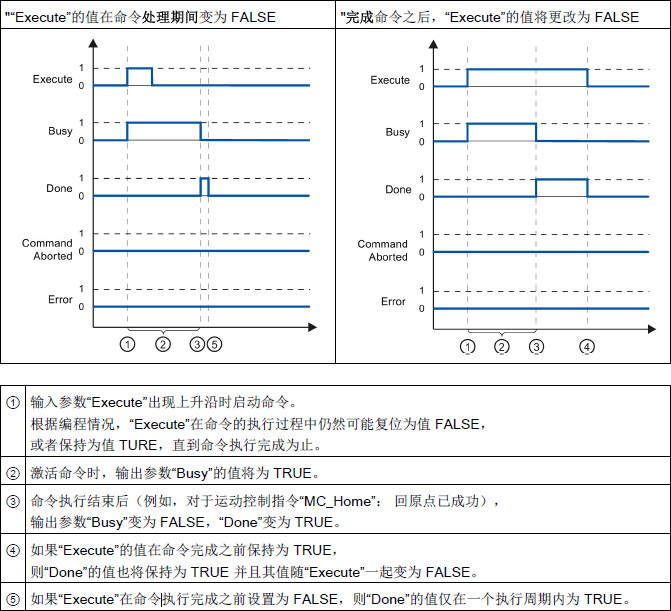
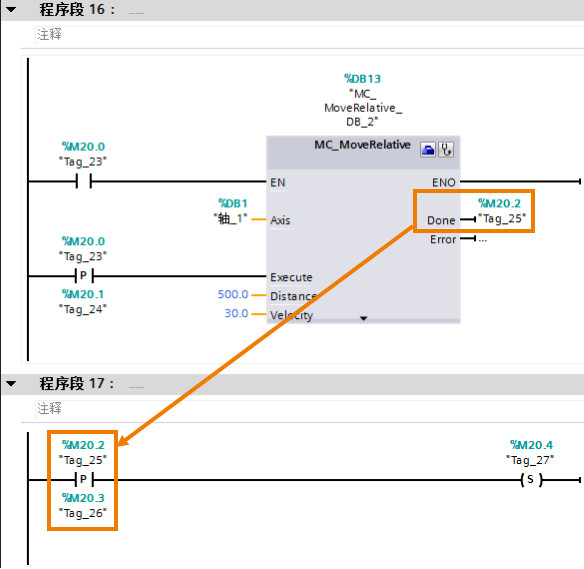
如上圖所示,如果"Execute"在命令執(zhí)行完成之前設(shè)置為 FALSE,則"Done"的值僅在一個(gè)執(zhí)行周期內(nèi)為 TRUE。因此,如果用戶(hù)用|P|指令觸發(fā)帶有“Execute”管腳的指令,則該指令的“Done”只在一個(gè)掃描周期內(nèi)為1,因此在監(jiān)控程序時(shí)看不到Done位為1。用戶(hù)可以通過(guò)在程序中添加指令用Done置位一個(gè)位來(lái)判斷,如下圖所示,用MC_MoveRelative為例進(jìn)行說(shuō)明。
4. 回原點(diǎn)已完成信號(hào)什么時(shí)候會(huì)丟失?
答:請(qǐng)參見(jiàn)下表。
| PTO軸 | 閉環(huán)軸使用增量編碼器 | 閉環(huán)軸使用值編碼器 | |
|---|---|---|---|
| 啟動(dòng)MC_Home命令進(jìn)行主動(dòng)回原點(diǎn)* | √ | √ | - |
| 通過(guò)"MC_Power"運(yùn)動(dòng)控制指令,禁用軸 | √ | ||
| 通過(guò)調(diào)試面板回原點(diǎn)后取消調(diào)試功能 | √ | ||
| CPU 斷電 -> 上電后 | √ | √ | |
| CPU 重新啟動(dòng)后 (RUN -> STOP -> RUN) | √ | ||
| 編碼器系統(tǒng)出錯(cuò)或編碼器故障 | - | √ | √ |
| 重新啟動(dòng)工藝對(duì)象 | √ | √ | |
| 存儲(chǔ)器復(fù)位 | √ | √ | |
| 修改編碼器組態(tài) | - | √ | √ |
| 更換 CPU | √ | √ | √ |
| 將 CPU 恢復(fù)為出廠設(shè)置 | √ | √ | √ |
| 將其它項(xiàng)目傳送到控制器 | √ | √ | √ |
*:成功完成回原點(diǎn)操作之后,"已回原點(diǎn)"狀態(tài)將再次置位。
5. 什么時(shí)候需要執(zhí)行回原點(diǎn)命令?
答:用戶(hù)需要使用MC_MoveAbsolute指令之前執(zhí)行回原點(diǎn)指令。
6. 如果實(shí)際沒(méi)有原點(diǎn)開(kāi)關(guān)和限位開(kāi)關(guān),可以使用定位指令MC_MoveAbsolute嗎?
答: 可以。
對(duì)于PTO軸或使用增量編碼器的閉環(huán)軸,使用MC_Home指令的Mode=0和Mode=1方式,讓軸完成坐標(biāo)定位。然后就可以調(diào)用MC_MoveAbsolute指令進(jìn)行運(yùn)動(dòng)了。
對(duì)于使用值編碼器的閉環(huán)軸,使用MC_Home指令的Mode=6和Mode=7方式,讓軸完成坐標(biāo)定位。然后就可以調(diào)用MC_MoveAbsolute指令進(jìn)行運(yùn)動(dòng)了。
MC_Home指令的Mode 0、1、6、7參見(jiàn)鏈接。
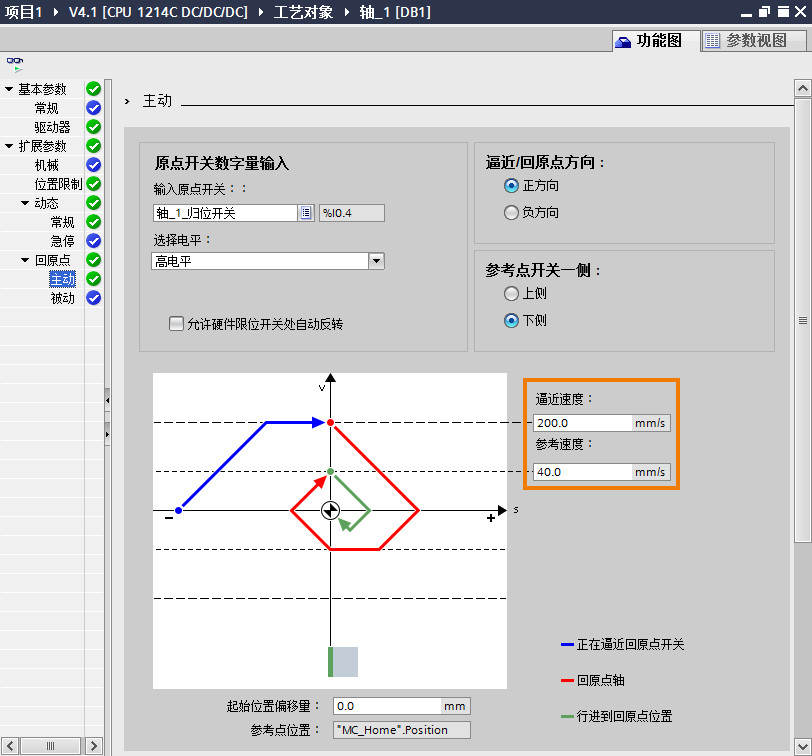
7. 為什么用戶(hù)在實(shí)際執(zhí)行回原點(diǎn)指令時(shí),軸遇到原點(diǎn)開(kāi)關(guān)沒(méi)有變化,直到運(yùn)行到硬件限位開(kāi)關(guān)停止報(bào)錯(cuò)?
答:首先要測(cè)試原點(diǎn)開(kāi)關(guān)是否起作用,也就是說(shuō)當(dāng)軸碰到原點(diǎn)開(kāi)關(guān)時(shí),原點(diǎn)開(kāi)關(guān)的DI點(diǎn)的指示燈是否點(diǎn)亮。
可能的原因如下:
①尋找原點(diǎn)開(kāi)關(guān)的速度過(guò)快,可以減小“逼近速度”和“參考速度”